Презентация "Основы радиолокации и построения ЗРК (ЗРС)" – проект, доклад
 Слайд 1
Слайд 1 Слайд 2
Слайд 2 Слайд 3
Слайд 3 Слайд 4
Слайд 4 Слайд 5
Слайд 5 Слайд 6
Слайд 6 Слайд 7
Слайд 7 Слайд 8
Слайд 8 Слайд 9
Слайд 9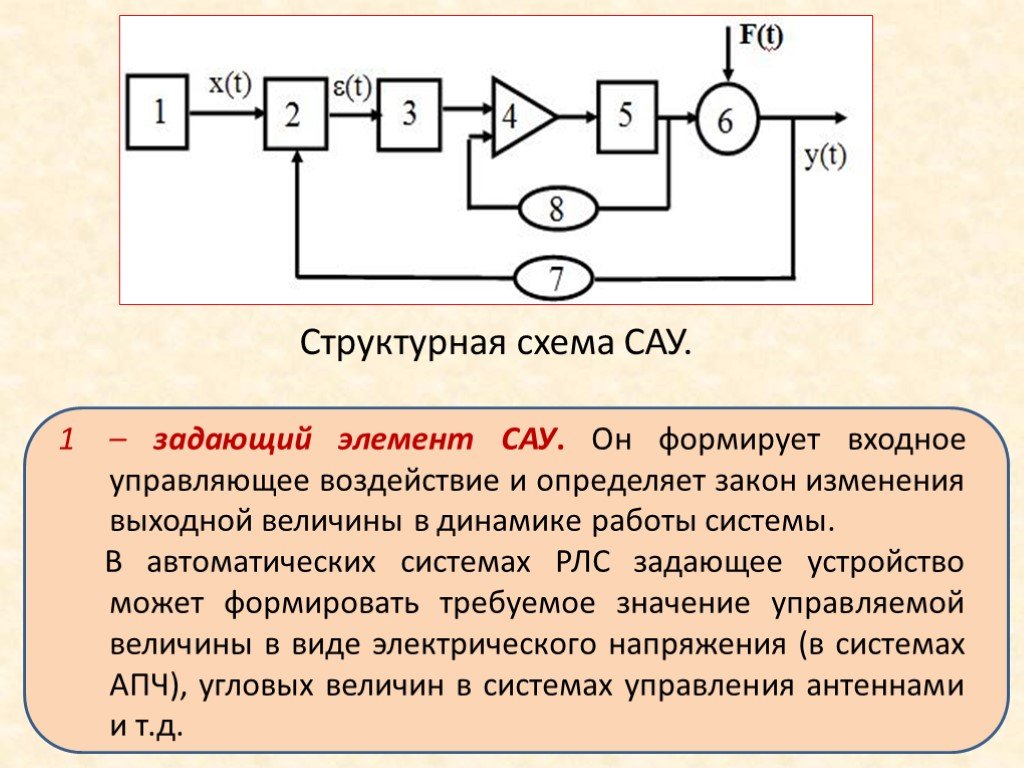 Слайд 10
Слайд 10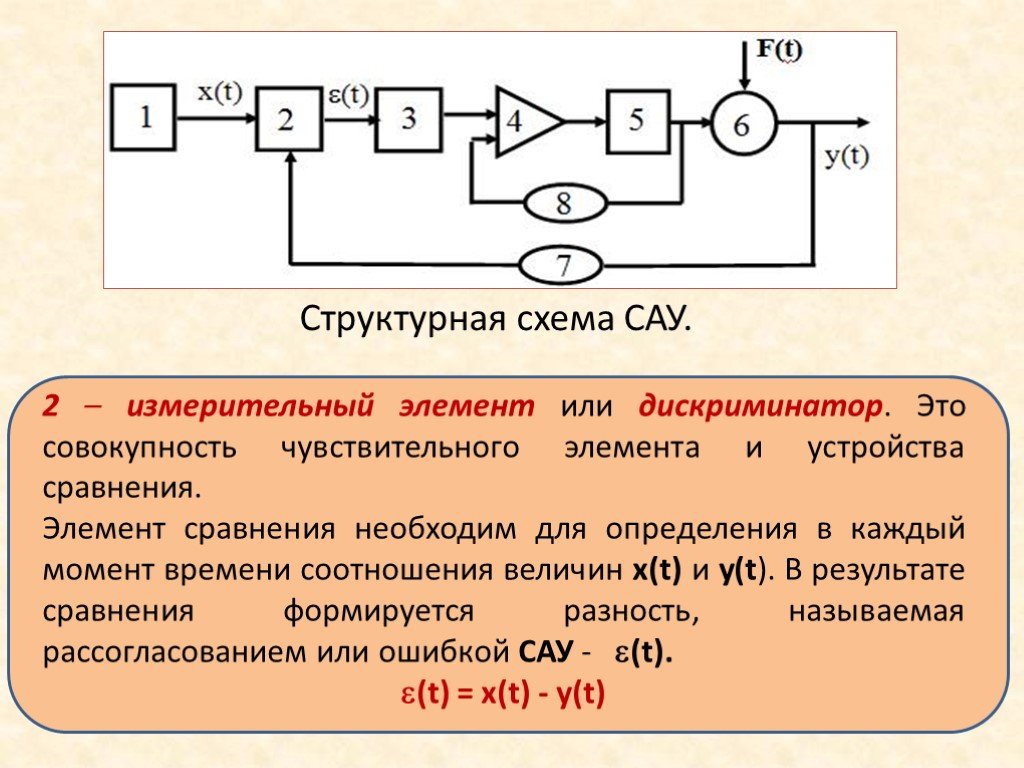 Слайд 11
Слайд 11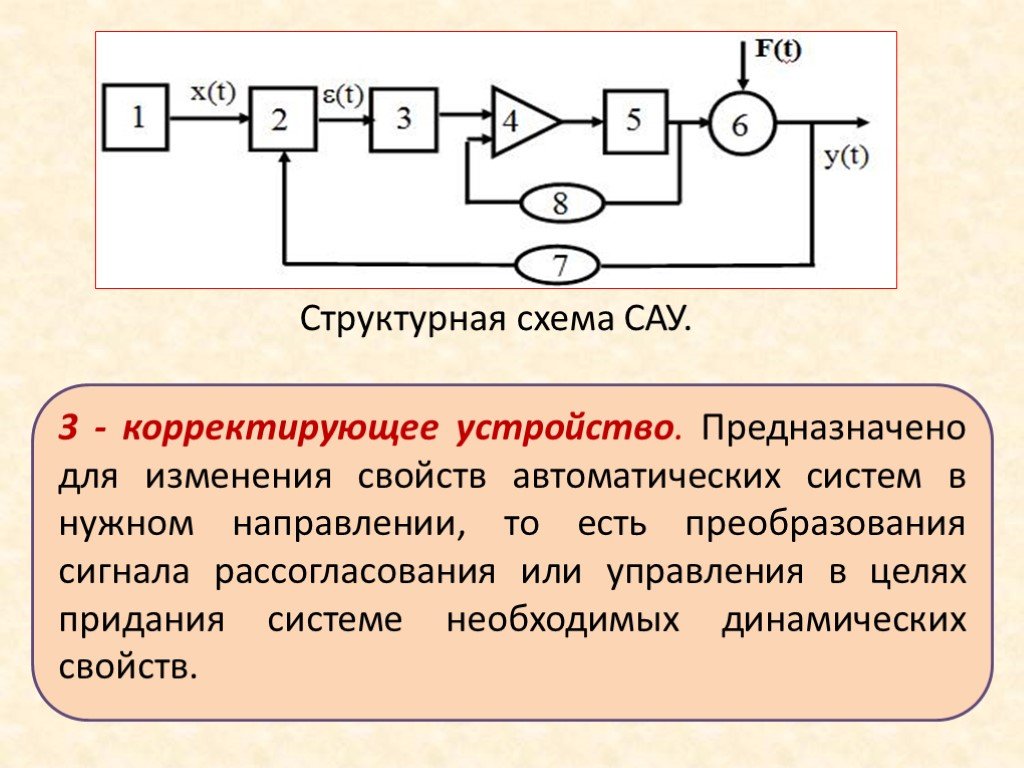 Слайд 12
Слайд 12 Слайд 13
Слайд 13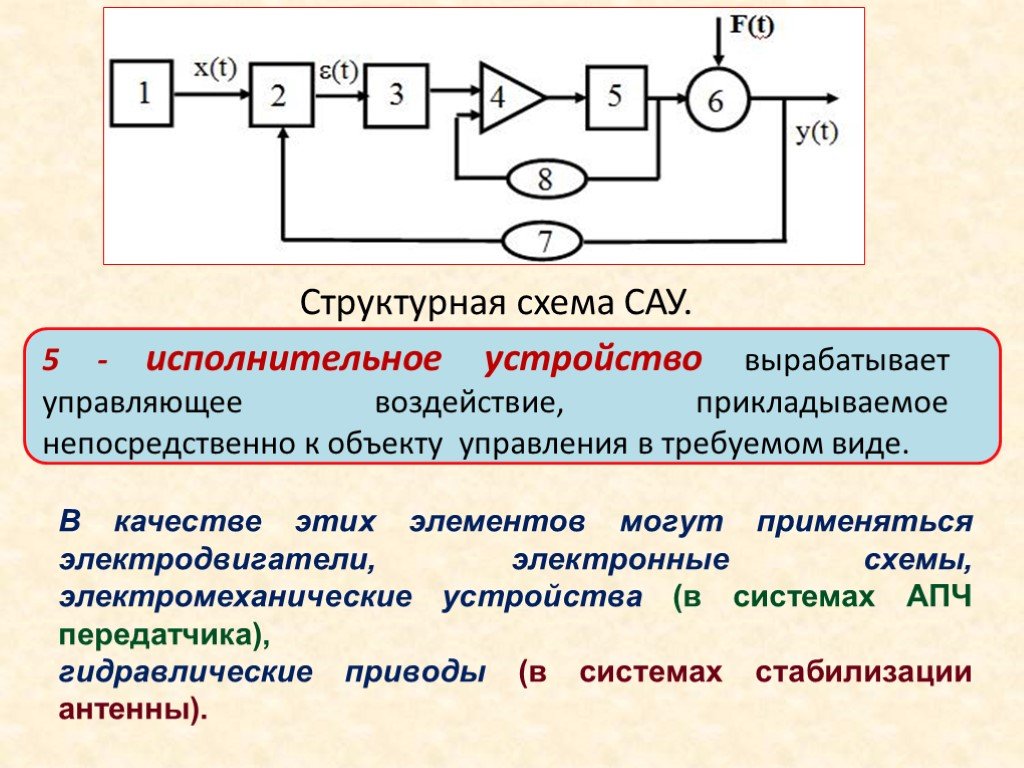 Слайд 14
Слайд 14 Слайд 15
Слайд 15 Слайд 16
Слайд 16 Слайд 17
Слайд 17 Слайд 18
Слайд 18 Слайд 19
Слайд 19 Слайд 20
Слайд 20 Слайд 21
Слайд 21 Слайд 22
Слайд 22 Слайд 23
Слайд 23 Слайд 24
Слайд 24 Слайд 25
Слайд 25 Слайд 26
Слайд 26 Слайд 27
Слайд 27 Слайд 28
Слайд 28 Слайд 29
Слайд 29 Слайд 30
Слайд 30 Слайд 31
Слайд 31 Слайд 32
Слайд 32 Слайд 33
Слайд 33 Слайд 34
Слайд 34 Слайд 35
Слайд 35Презентацию на тему "Основы радиолокации и построения ЗРК (ЗРС)" можно скачать абсолютно бесплатно на нашем сайте. Предмет проекта: Разные. Красочные слайды и иллюстрации помогут вам заинтересовать своих одноклассников или аудиторию. Для просмотра содержимого воспользуйтесь плеером, или если вы хотите скачать доклад - нажмите на соответствующий текст под плеером. Презентация содержит 35 слайд(ов).
Слайды презентации
Список похожих презентаций
 РТВ ВВС")
Основы построения систем и устройств РЛК (РЛС) РТВ ВВС
Литература:. 1).Ю.А .Буланов, С.Н.Усов. Усилители и радиоприёмные устройства. Изд.Высшая школа,М.1971г.(стр.289-340) 2).Ю.Н.Седышев. Приёмные устройства ...
Основы управления знаниями
Темп НТП. Половина всей информации, которой пользуется человек в современном мире, получена за последние 15 лет. Глобальный объем информации удваивается ...
Основы теории социальной работы
Основные понятия курса. Социальная защита – система мероприятий, осуществляемых обществом и его различными структурами, по обеспечению гарантированных ...
Основы рекламы
Рекомендуемая литература. 1.Васильев Г.А., Поляков В.А. Основы рекламы М.: ЮНИТИ, 2006 учебное пособие для вузов 2.Панкратов Ф.Г. и др.Основы рекламы ...
Основы психолого-педагогического сопровождения детей с ОВЗ в условиях инклюзивного профессионального образования
Цель: формирование у будущих бакалавров профессионального образования системы научных представлений об инклюзивном образовании лиц с ОВЗ, осуществление ...
Основы предпринимательского дела
Структура курса. Сущность предпринимательства История предпринимательства в России Предпринимательство и бизнес Виды предпринимательской деятельности ...
Взаимодействие элементов ЗРС СД-ДД при ее функционировании
Занятие №6 Взаимодействие элементов ЗРС СД-ДД при её функционировании. Учебные вопросы: 1. Обеспечение целеуказанием с КП системы 2. Поиск, обнаружение ...
Основы видеосъемки
Крупность. Дальний. Это панорамы, пейзажи. Главный персонаж занимает около 1/3 кадра и меньше. Дальним планом можно показать общее место событий, ...
Основы генетической инженерии
Группы ферментов, применяемые при конструировании рекомбинантных ДНК:. ферменты, с помощью которых получают фрагменты ДНК (рестриктазы); ферменты, ...
Основы автоматизации производственных процессов
Основы теории автоматического управления. Теория автоматического управления - наука, которая изучает процессы управления, методы их исследования и ...
Основы архивного хранения
22 октября 2004 года № 125-ФЗ ФЕДЕРАЛЬНЫЙ ЗАКОН ОБ АРХИВНОМ ДЕЛЕ В РОССИЙСКОЙ ФЕДЕРАЦИИ Принят Государственной Думой 1 октября 2004 года Одобрен Советом ...
Методы построения функции принадлежности
Методы построения функции принадлежности Измерения. Целью измерения является получение количественной информации о величине исследуемых объектов, ...
Математический пакет mathcad. Основы работы с системой mathcad
Математические пакеты. Начиная с 90-х годов прошлого века, широкую известность приобрели так называемые системы компьютерной математики или математические ...
Когнитивная психотерапия . Основы НЛП
Аарон Бек. Американский психо-терапевт , создатель когнитивной психотерапии. Когнитивная терапия А.Т.Бека наиболее широко применялась в области работы ...
Основы цифровой схемотехники
Цифровая интегральная схема (ИС) – это микроэлектронное изделие, изготовленное методами интегральной технологии (чаще полупроводниковой), заключенное ...
Основы государственной политики по организации борьбы с терроризмом
Терроризм : определение. В праве России терроризм определяется как идеология насилия и практика воздействия на общественное сознание, на принятие ...
Принципы построения компьютерных сетей.
КОМПЬЮТЕРНАЯ СЕТЬ. Территориальная распространенность. . Тип среды передачи информации. КОАКСИЛЬНЫЙ КАБЕЛЬ. «ВИТАЯ ПАРА». ОПТОВОЛОКОННЫЙ КАБЕЛЬ. Топология ...
Основы гуманистического воспитания
Традиционное обучение основано на положении учителя в качестве субъекта, а ученика - объекта педагогического процесса. В концепции сотрудничества ...
Основы пластической хирургии и трансплантологии
Содержание: Пластическая хирургия Классификация Актуальность проблем Задача пластической хирургии Реконструктивные операции Эстетические Противопоказания ...
Основы Десмургии
Общая характеристика повязок: Раздел хирургии, изучающий типы и виды повязок, правила, способы и цели их наложения, называется десмургией. Процесс ...Советы как сделать хороший доклад презентации или проекта
- Постарайтесь вовлечь аудиторию в рассказ, настройте взаимодействие с аудиторией с помощью наводящих вопросов, игровой части, не бойтесь пошутить и искренне улыбнуться (где это уместно).
- Старайтесь объяснять слайд своими словами, добавлять дополнительные интересные факты, не нужно просто читать информацию со слайдов, ее аудитория может прочитать и сама.
- Не нужно перегружать слайды Вашего проекта текстовыми блоками, больше иллюстраций и минимум текста позволят лучше донести информацию и привлечь внимание. На слайде должна быть только ключевая информация, остальное лучше рассказать слушателям устно.
- Текст должен быть хорошо читаемым, иначе аудитория не сможет увидеть подаваемую информацию, будет сильно отвлекаться от рассказа, пытаясь хоть что-то разобрать, или вовсе утратит весь интерес. Для этого нужно правильно подобрать шрифт, учитывая, где и как будет происходить трансляция презентации, а также правильно подобрать сочетание фона и текста.
- Важно провести репетицию Вашего доклада, продумать, как Вы поздороваетесь с аудиторией, что скажете первым, как закончите презентацию. Все приходит с опытом.
- Правильно подберите наряд, т.к. одежда докладчика также играет большую роль в восприятии его выступления.
- Старайтесь говорить уверенно, плавно и связно.
- Старайтесь получить удовольствие от выступления, тогда Вы сможете быть более непринужденным и будете меньше волноваться.
Информация о презентации
Дата добавления:9 сентября 2019
Категория:Разные
Содержит:35 слайд(ов)
Поделись с друзьями:
Скачать презентацию









