Слайд 1Тема №3.Основы построения систем и устройств РЛК (РЛС) РТВ ВВС. Занятие №5Регулирование усиления в приёмных устройствах РЛС.
Вопрос№1.Ручная и автоматическая регулировка усиления( РРУ и АРУ). Вопрос№2. Временная АРУ (ВАРУ). Вопрос №3. Мгновенная АРУ (МАРУ) Вопрос№4. Шумовая АРУ (ШАРУ).
Слайд 2Литература:
1).Ю.А .Буланов, С.Н.Усов. Усилители и радиоприёмные устройства. Изд.Высшая школа,М.1971г.(стр.289-340) 2).Ю.Н.Седышев. Приёмные устройства радиолокационных сигналов.Воениздат.М.1977г.Стр.59-108.

Слайд 3При работе станции на вход приемника поступают радиоимпульсы различной интенсивности в зависимости от расстояния до цели, ее отражающей поверхности и ряда других причин. Тем не менее необходимо одинаково наблюдать как слабые, так и сильные отраженные сигналы. Эти требования можно выполнить, если быстро изменять усиление приемника. Для этого в приемниках применяются автоматические регулировки усиления. В процессе эксплуатации происходят старение и замена ламп приемника, в результате чего изменяется его коэффициент усиления. На выходе приемника во весь период эксплуатации должен быть сигнал определенной амплитуды при ¦подаче на его вход сигналов определенной интенсивности. Для обеспечения этого служит ручная регулировка усиления (РРУ). РРУ также позволяет оператору выбирать усиление в зависимости от интенсивности отраженного сигнала. Наиболее распространенным способом автоматической и ручной регулировки усиления в радиолокационных приемниках является регулировка за счет изменения крутизны характеристики лампы одного или нескольких каскадов усилителя промежуточной частоты. Иногда применяется регулировка в видеоусилителе.
Введение
 ряда технических параметров приемника: частоты настойки, коэффициента усиления, полосы пропускания и др. В зависимости от вида регулируемого парамет")
Слайд 4В процессе эксплуатации радиоприемных устройств, для обеспечения наилучших условий приёма сигналов, возникает необходимость в изменении (регулировании) ряда технических параметров приемника: частоты настойки, коэффициента усиления, полосы пропускания и др. В зависимости от вида регулируемого параметра различают: регулировку усиления, регулировку частоты настройки, регулировку полосы пропускания. Возможны регулировки и ряда других параметров приемника. Регулировки бывают ручные и автоматические. Ручные регулировки служат для установки исходных показателей радиоприемника. Автоматические регулировки поддерживают выбранные показатели приемника на требуемом уровне. В современных радиолокационных приемниках для регулировок, управления и контроля широко используются микропроцессоры.
Вопрос№1.Ручная и автоматическая регулировка усиления( РРУ и АРУ).

Слайд 5На вход радиолокационного приемника поступают сигналы, амплитуда которых изменяется в широком диапазоне, т.к. мощность сигналов, отраженных от цели, обратно пропорциональна четвертой степени расстояния до цели, зависит от эффективной поверхности рассеяния цели и изменения условий распространения радиоволн в различных направлениях. Работа РЛС в реальных условиях сопровождается воздействием различного рода активных и пассивных нестационарных помех естественного и искусственного происхождения. Уровень мощности помех может значительно (на 20…60 дБ) превышать уровень полезных сигналов, а параметры помех априорно неизвестны. Воздействие помех еще больше расширяет диапазон изменения амплитуд сигналов , поступающих на вход антенны РЛС

Слайд 6Динамический диапазон определяет способность приемника работать без перегрузки при воздействии сильных сигналов и помех. Количественно определяется динамическим диапазоном по входному Двх и выходному Двых сигналу. Динамическим диапазоном по входному сигналу Двх называют отношение максимального входного напряжения Двх. макс, при котором отсутствует перегрузка приемника, к минимальному входному напряжению Двх. мин, соответствующему предельной чувствительности приемника:
Слайд 7Аналогично определяется динамический диапазон по выходному сигналу:
Иногда определяют Двх и Двых через мощности:
Измеряется Двх и Двых в относительных единицах или децибелах
В современных приемниках должно быть ,до 120db. Зависимость Uвых от Uвх называют амплитудной характеристикой приемника.
Слайд 8Амплитудная характеристика приемника(АХ)
Слайд 9Динамический диапазон работы оконечных устройств может оказаться еще меньше чем динамический диапазон выходных сигналов приемника Дпр.вых. Приемники, у которых не приняты специальные меры имеют ДПР = 21...30 дБ. Этого явно недостаточно, т.к. Дсвх = 80...120 дБ, т.е. большая часть принимаемых сигналов не будет обработана радиоприемником. Для обеспечения ДПР = 80..20 дБ необходимо, чтобы величина коэффициента усиления приемника определенным: образом зависела от уровня принимаемости сигналов. Для этой цели в состав радиоприемника вводятся регулировки усиления, устанавливающие коэффициент усиления (К) в соответствии с уровнем принимаемых сигналов. Введение регулировок усиления в радиолокационный приемник позволяет поддерживать постоянным уровень выходных сигналов (сжать динамический диапазон приемника по выходу) изменении амплитуды входных сигналов в широких пределах или осуществлять стабилизацию уровня шума на выходе приемника.

Слайд 10Выработка регулируемого напряжения и подача его на регулируемые каскады могут осуществляться вручную или автоматически. В соответствии с этим различают: -ручные регулировки усиления; -автоматические регулировки усиления. В свою очередь по скорости срабатывания автоматические регулировки делятся на инерционные (АРУ), быстродействующие (БАРУ), мгновенные (МАРУ).
Слайд 111.1.Ручная регулировка усиления .Регулировка изменением крутизны S.
Такая регулировка осуществляется изменением режима работы электронного прибора. Для изменения крутизны S необходимо менять напряжение смещения на управляющем электроде электронного прибора: напряжение U630 в биполярном транзисторе (рис. 8.2), Uск на триоде или Uс2 на пентоде (рис. 8.3.)
Слайд 12
Слайд 13Система АРУ с обратной связью представляет собой замкнутую систему автоматического регулирования. Структурная схема регулируемого УПЧ, охваченного простейшей цепью АРУ
1.2.Автоматическая регулировка усиления.
Разнотипности схем АРУ с обратной связью
Слайд 14Амплитудная характеристика приемника: 1 – без АРУ; 2 - с АРУ
Слайд 15Рассмотренные схемы АРУ значительно расширяют динамический диапазон по входу, т.е.
 и фильтр нижних частот (Ф). Сигнал с выхода регулируемого УПЧ подается на детектор АРУ. В качестве детектора может применяться пиковый или обычный импульсный импульсный детектор. Постоянная составляющая напряжения, выделенного детектором, подается чере")
Слайд 16В состав такой цепи АРУ входит детектор АРУ (Д) и фильтр нижних частот (Ф). Сигнал с выхода регулируемого УПЧ подается на детектор АРУ. В качестве детектора может применяться пиковый или обычный импульсный импульсный детектор. Постоянная составляющая напряжения, выделенного детектором, подается через фильтр низких частот на элемент регулировки в регулируемом УПЧ (на вход УПЧ). Фильтр низких частот позволяет отфильтровать напряжение промежуточной частоты и частоты модуляции, которые имеются на нагрузке детектора. При увеличении амплитуды сигнала на входе регулируемого УПЧ возрастает напряжение на его выходе, что вызывает увеличение напряжения регулирования Uр цепи АРУ, подаваемого на регулируемый УПЧ. Это напряжение, воздействуя на элемент регулировки, снижает усиление УПЧ. Поэтому, чем больше амплитуда входного сигнала, тем меньше коэффициент усиления регулируемого каскада и в целом всего приемника.
. Основная задача временной автоматической регулировки усиления (ВАРУ) состоит в том, чтобы исключить перегрузку радиоприемного устройства сигналами отраженными от объектов, находящихся на небольшой дальности. K = br2. Схема временного автоматического регулирования усиле")
Слайд 17Вопрос№2. Временная АРУ(ВАРУ).
Основная задача временной автоматической регулировки усиления (ВАРУ) состоит в том, чтобы исключить перегрузку радиоприемного устройства сигналами отраженными от объектов, находящихся на небольшой дальности. K = br2
Схема временного автоматического регулирования усиления (ВАРУ) предназначена для уменьшения усиления мощных сигналов, принятых в начале дистанции, с последующим плавным восстановлением усиления по дистанции. Этим обеспечивается расширение динамического диапазона тракта (исключение перегрузки приемника) и снижение возможности приема сигналов по боковым лепесткам диаграммы направленности антенны.
Слайд 18
Слайд 19Принцип работы ВАРУ
Слайд 20Схема ВАРУ состоят из регулируемого усилителя или управляемого аттенюатора включенного в линейную часть приемника и генератора регулирующего напряжение Uр, запускаемого импульсами синхронизации (рис.8.17.)
Слайд 21
Слайд 22Вопрос №3. Мгновенная АРУ (МАРУ) Схема МАРУ служит для защиты УПЧ от перегрузки помехами большой амплитуды и длительности, превышающей длительность полезного сигнала. Схема МАРУ позволяет автоматически снижать усиление УПЧ при наличии на его входе длительной помехи, не ослабляя при этом сигналы, принимаемые вслед за помехой. Для того, чтобы при действии схемы МАРУ не подавлялись полезные сигналы, она срабатывает с задержкой, равной длительности полезного сигнала.

Слайд 23Мгновенная автоматическая регулировка усиления является универсальной, работающей по любым полезным и помеховым сигналам, в том числе и по сигналам, характер которых подобен шуму. Практически регулировка осуществляется путем мгновенной установки дифференциального коэффициента усиления специальных УПЧ, имеющих логарифмическую амплитудную характеристику. В усилителях с логарифмической амплитудной характеристикой (ЛАХ) дифференциальный коэффициент усиления КЛАХ обратно пропорционален амплитуде входного сигнала. Эти усилители обладают весьма широким динамическим диапазоном.
 где а - коэффициент пропорциональности. Из выражения (1) (после")
Слайд 24Дифференциальный коэффициент усиления усилителя с ЛАХ равен отношению бесконечно малого приращения выходного напряжения dUвых к бесконечно малому приращению входного напряжения dUвх и выражается формулой КЛАХ = dUвых/dUвх = а/dUвх, (1) где а - коэффициент пропорциональности. Из выражения (1) (после интегрирования) следует, что Uвых = a lnUвх + c, где с - постоянная интегрирования. Нетрудно получить, что Uвых = КоUвх[ ln (Uвх/Uвх н + 1)], (2) где Uвх н - входное напряжение, соответствующее переходу от линейного участка амплитудной характеристики к логарифмическому, Ко - коэффициент усиления в линейном режиме (при Uвх < Uвх н). Из выражения (2) следует, что для того, чтобы дифференциальный коэффициент усиления был обратно пропорционален амплитуде входного сигнала, АХ УПЧ должна быть логарифмической (рис.3).

Слайд 25Приемник с ЛАХ обеспечивает практически безинерционную нормировку входных сигналов, не теряет чувствительности после прихода сильных сигналов и имеет собственные шумы, незначительно превышающие шумы обычного приемника.
Рис.3. Логарифмическая амплитудная характеристика УПЧ
Слайд 26Логарифмический усилитель с последовательным детектированием
Слайд 27Быстродействующая автоматическая регулировка усиления (БАРУ) предназначена для повышения эффективности приема слабых сигналов на фоне отражений от местных предметов большой протяженности
Структурная схема БАРУ
Слайд 28Цепь БАРУ должна воздействовать лишь на один, максимум два каскада УПЧ. Требуемый диапазон регулировок обеспечивается за счет охвата отдельными цепями БАРУ нескольких каскадов УПЧ. Подводя итог, следует отметить, что рассмотренные устройства не подавляют полностью длинноимпульсную помеху, а лишь укорачивают ее до длительности полезного сигнала, уменьшая тем самым ее мешающее действие.

Слайд 29Принцип работы БАРУ аналогичен принципу работы инерционной АРУ. Разница между ними состоит в скорости срабатывания. Скорость изменения усиления системы БАРУ должна соответствовать скорости изменения амплитуды помехи. Вместе с тем БАРУ не должна реагировать на полезные сигналы. Очевидно, это можно обеспечить только в том случае, если спектр сигнала шире спектра помехи, т. е. в случае узкополосной помехи. В этом смысле БАРУ эквивалентна фильтру верхних частот, который обеспечивает подавление частот от нуля до некоторой граничной частоты. Короткие импульсы сигнала, имеющие спектр частот, значительно выходящий за граничную полосу фильтра, проходят с некоторым ослаблением, в то время как длительная помеха, обладающая более узким спектром, будет в значительной мере подавлена.
 состоит из следующих элементов: детектора, усилителя и фильтра низких частот. Принцип работы системы заключается в следующем. При воздействии на вход приемника мощных и сравнительно длительных отражений от местных предметов или облачности схема БАРУ вырабатывает постоянное напря")
Слайд 30Система БАРУ (рис.5) состоит из следующих элементов: детектора, усилителя и фильтра низких частот. Принцип работы системы заключается в следующем. При воздействии на вход приемника мощных и сравнительно длительных отражений от местных предметов или облачности схема БАРУ вырабатывает постоянное напряжение, которое поступает на вход регулируемого каскада УПЧ в виде добавочного смещения. При этом смещение подается автоматически с запаздыванием на время, соизмеримое с длительностью зондирующего импульса. Для того чтобы исключить потерю полезного сигнала, рабочая точка А на характеристике лампы регулируемого каскада (рис. 6) должна быть смещена на величину Uр, равную амплитуде помехи на входе регулируемого каскада. После прекращения помехи рабочая точка Б автоматически возвращается в исходное положение А. Малая постоянная времени цепи обратной работы связи накладывает существенный отпечаток на схемное решение системы БАРУ. По соображениям устойчивости не представляется возможным охватить
 РТВ ВВС Слайд: 31")
Слайд 31
Слайд 32Рис6 Принцип действия БАРУ
Слайд 33Вопрос№4 Шумовая АРУ (ШАРУ). Средний уровень шумового напряжения на выходе приемного устройства определяет величину напряжения срабатывания порогового устройства U0 при заданной вероятности ложной тревоги F.
Осциллограмма шумового напряжения
Слайд 34ШАРУ является разновидностью инерционной автоматической регулировки усиления непрерывного действия. Особенность ее состоит в том, что входным возмущением цепи ШАРУ является не сигнал, а шум. Поэтому в цепь ШАРУ включается селектор шума, обеспечивающий подачу на ее вход выборки шума. В частности, таким селектором может служить стробируемый каскад, открываемый в момент отсутствия сигналов, например на участке дальности, превосходящей максимальную.
Слайд 35Структурная схема ШАРУ
Слайд 36
Слайд 37Схема ШАРУ представляет собой статическую систему автоматического регулирования коэффициента усиления УПЧ. Продетектированный (детектором ШАРУ) выходной шум УПЧ сглаживается узкополосным фильтром, благодаря чему на выходе фильтра выделяется напряжение, пропорциональное среднему уровню шума. Это напряжение усиливается в УПТ и подается на первые 2...3 каскада УПЧ для регулировки их коэффициента усиления. Чем больше уровень помехи на выходе УПЧ, тем больше величина регулируемого напряжения на выходе схемы ШАРУ и тем меньше коэффициент усиления УПЧ.. Быстродействие, однако, не должно быть очень высоким, чтобы схема не срабатывала по полезному сигналу и не ухудшала отношение сигнал-помеха. Динамический диапазон приемно-индикаторного тракта при введении схемы ШАРУ или применении УПЧ с ЛАХ расширяется до 50...60дБ.

Слайд 38Применение схемы ШАРУ и УПЧ с ЛАХ не приводит к улучшению отношения сигнал-помеха. Положительный эффект этих схем состоит в том, что они стабилизируют шумовую помеху на выходе УПЧ на уровне, значительно меньшем уровня ограничения в последующих элементах приемно-индикаторного тракта, и тем самым способствуют обнаружению сигнала в том случае, когда отношение сигнал - помеха больше единицы (2Эпр/(Nо+Nп) > 1). Отличие между приемниками с ЛАХ и с ШАРУ заключается в следующем. Схема ШАРУ, постоянную времени которой выбирают равной tшару =(10...20)и, не реагирует на полезные сигналы и отдельные выбросы помехи, благодаря чему обеспечивается линейная обработка сигналов (полезные сигналы не ограничиваются, структура помехи в установившемся режиме не изменяется). Но вследствие инерционности схемы ШАРУ изменение коэффициента усиления приемника происходит с некоторым запаздыванием относительно моментов изменения интенсивности помехи на входе приемника. В результате, если например, уровень помехи на входе быстро возрастает, то вследствие того, что коэффициент усиления приемника еще в течение некоторого времени (tшару) будет оставаться прежним, возрастает уровень помехи и на выходе приемника. На экране индикатора появляется кратковременный засвет (передняя кромка помехи). Если же, наоборот, уровень помехи на входе резко уменьшится, то на экране появится темное пятно. Приемник с ЛАХ на изменения интенсивности помехи реагирует практически мгновенно и указанных явлений на экране индикатора наблюдаться не будет. Однако он реагирует и на отдельные выбросы помехи, из-за чего обработка сигналов становится нелинейной (структура помехи нарушается, сигнал частично ограничивается).
 являются схема ШОУ (широкополосный усилитель - ограничитель -узкополосный усилитель) в РЛС с длинными простыми импульсами (рис.4.9). Ограничение помехи обеспечивает стабилиза")
Слайд 39Примером реализации такого метода расширения динамического диапазона приемника (точнее сжатия динамического диапазона помехи) являются схема ШОУ (широкополосный усилитель - ограничитель -узкополосный усилитель) в РЛС с длинными простыми импульсами (рис.4.9). Ограничение помехи обеспечивает стабилизацию интенсивности помехи на таком уровне, чтобы не происходило ограничения в последующих элементах приемника, где ограничение уже недопустимо.
В схеме ШОУ узкополосный фильтр является оптимальным (квазиоптимальным) фильтром для простого импульса, т.е. ширина его полосы пропускания выбирается из условия fузк = 1/и. Ширина же полосы пропускания широкополосного УПЧ выбирается в 50...100 раз больше: fшупч=(50...100)fузк. В результате на выходе широкополосного УПЧ и ограничителя средняя длительность шумовых выбросов ш=1/fшупч в (50...100) раз меньше длительности полезного сигнала. Шумовые выбросы воздействуют на узкополосный фильтр короткое время, и их амплитуда на выходе фильтра оказывается небольшой. За время же длительности полезного сигнала его амплитуда на выходе узкополосного фильтра достигает большей величины. В результате полезный сигнал на выходе фильтра может быть выделен из шумовой помехи, хотя на входе фильтра амплитуда полезного сигнала и выбросов помехи из-за жесткого ограничения может быть одинаковой. Конечно, ограничение приводит к некоторому ухудшению отношения сигнал-шум, однако при этом достаточно простым способом стабилизируется уровень помехи на выходе и предотвращается полная потеря сигнала, которая могла бы иметь место из-за возможного ограничения в последующих цепях приемника.

Слайд 40Функциональная схема амплитудного канала приёмника блока РП-07 ПРВ-13
Слайд 411.Ю.А.Мельник; Г.В.Стогов.Основы радиотехники и радиотехни- ческие устройства.Москва «Советское радио» ,1973. 2.Е.А.Москатов.Электронная техника.Издание2.Таганрог,2005 3.В.Г.Левичев. Радиопередающие и радиоприемные устройства. Москва.Воениздат,1973.
Задание на самоподготовку 1.Изучить принцип работы схем автоматической регулировки усиления. 2.Изучить принцип построения УПЧ с логарифмической характеристикой. 3. Изучить принцип работы схемы ШОУ.
 Слайд 1
Слайд 1 Слайд 2
Слайд 2 Слайд 3
Слайд 3 Слайд 4
Слайд 4 Слайд 5
Слайд 5 Слайд 6
Слайд 6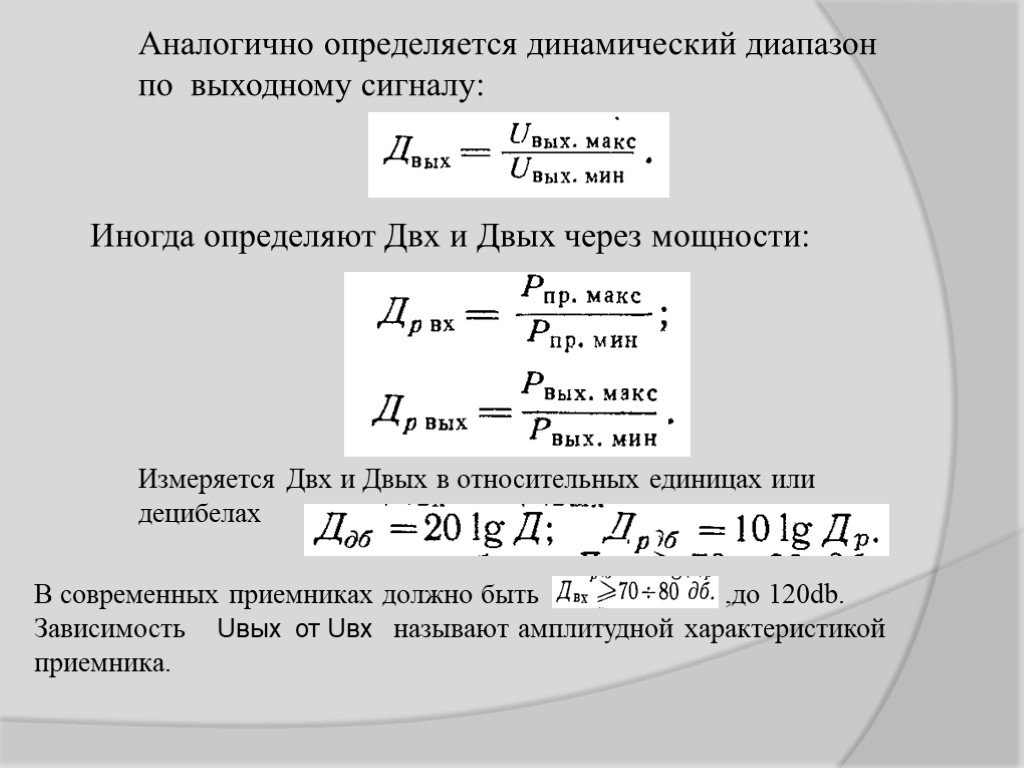 Слайд 7
Слайд 7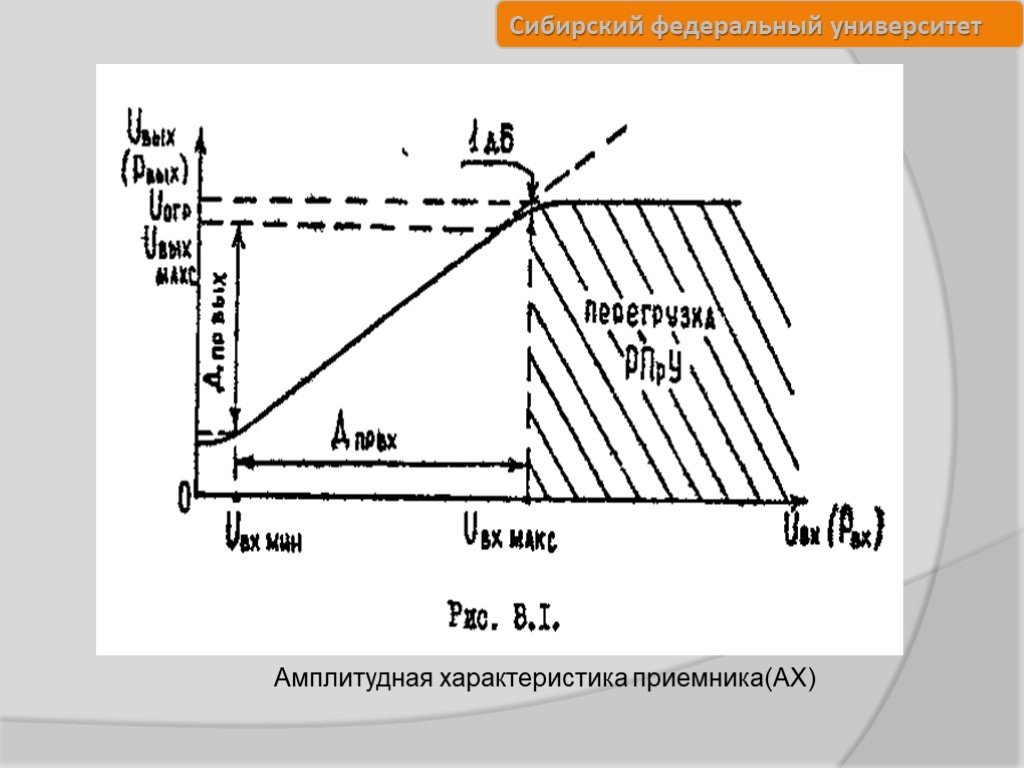 Слайд 8
Слайд 8 Слайд 9
Слайд 9 Слайд 10
Слайд 10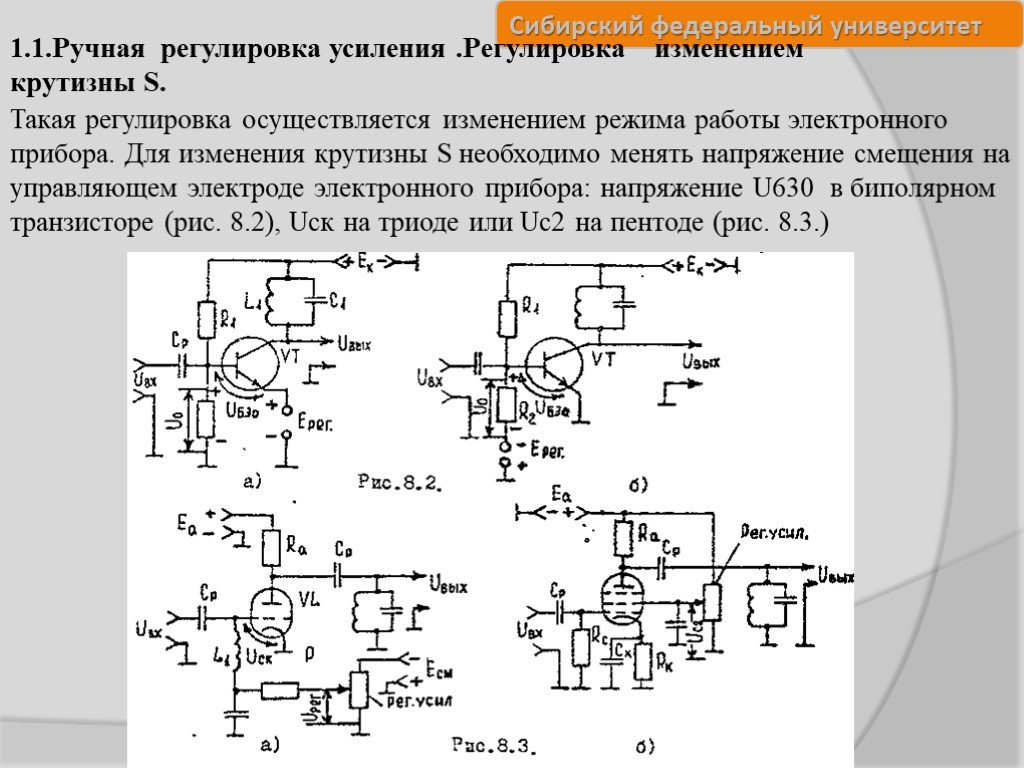 Слайд 11
Слайд 11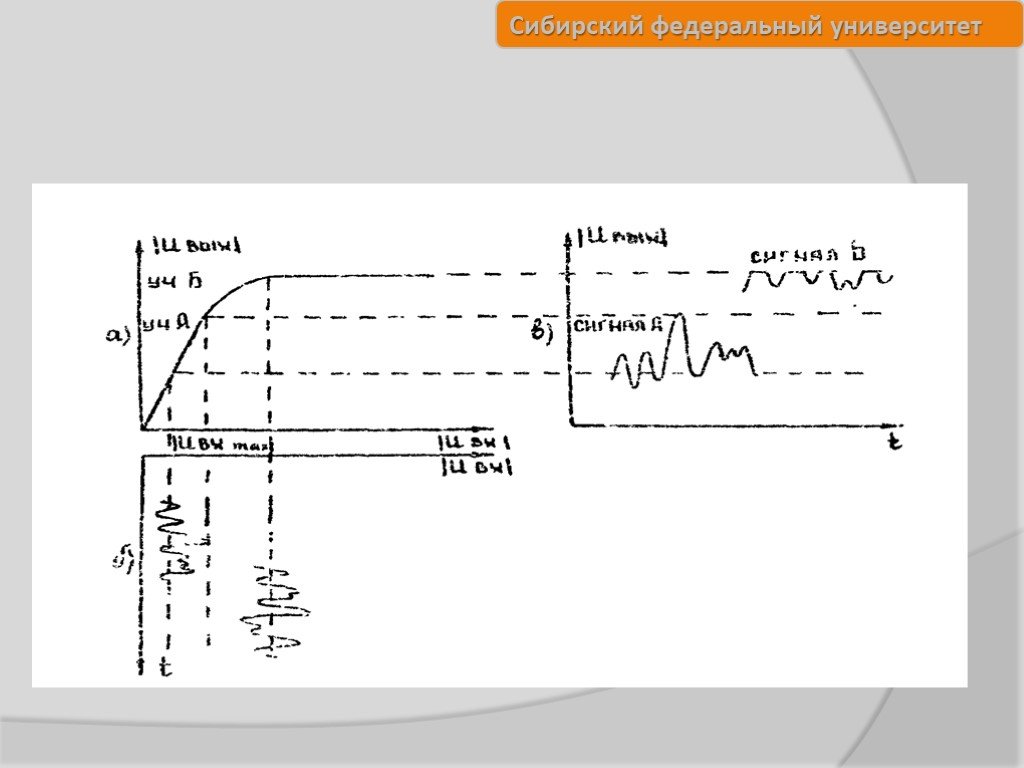 Слайд 12
Слайд 12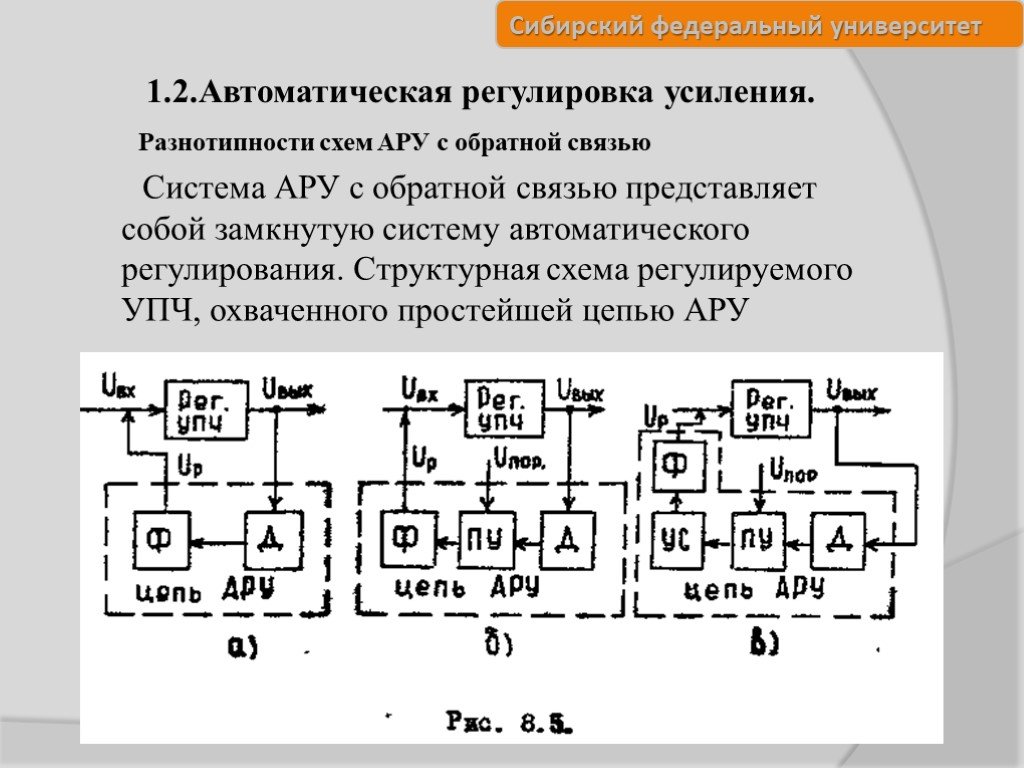 Слайд 13
Слайд 13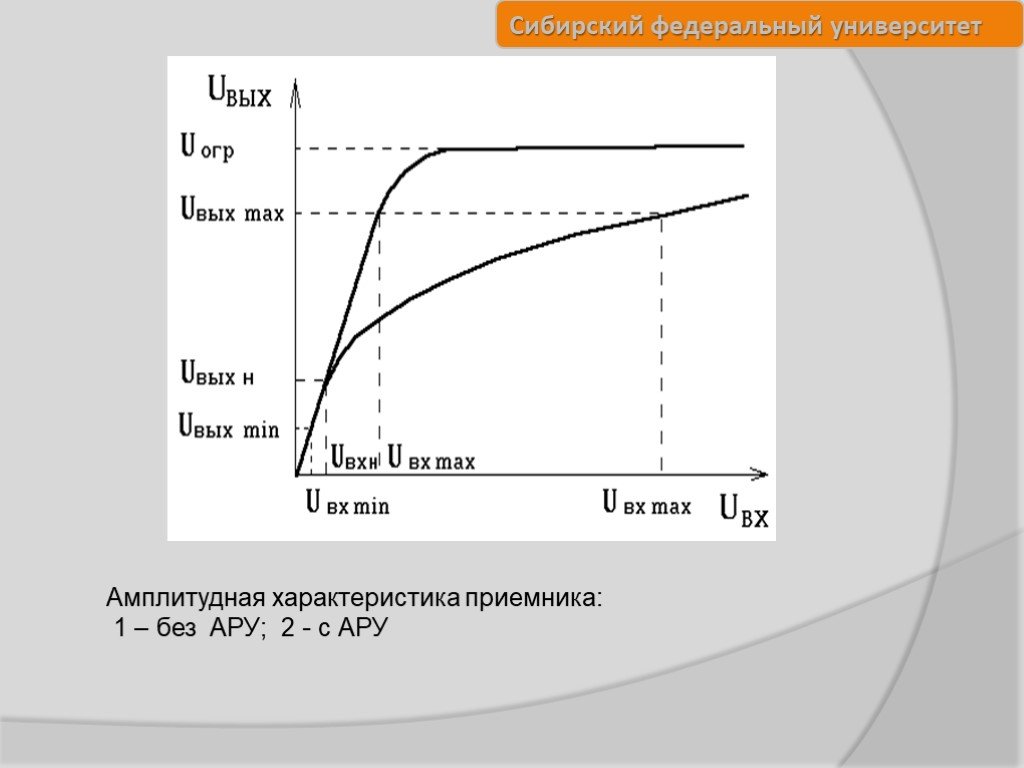 Слайд 14
Слайд 14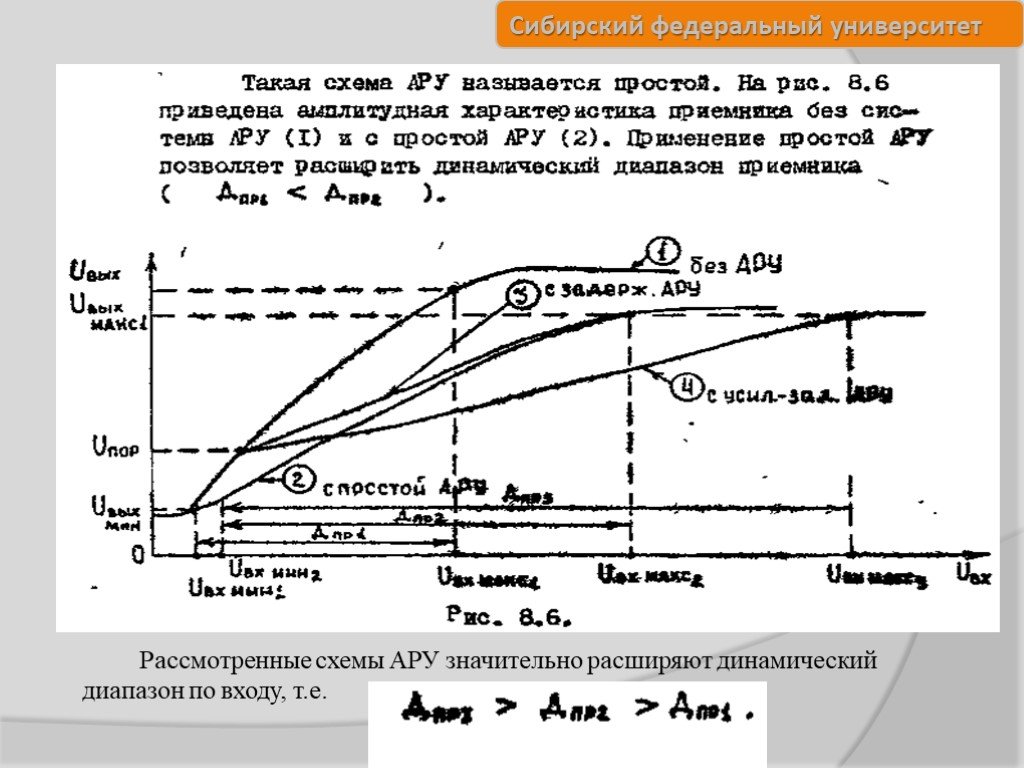 Слайд 15
Слайд 15 Слайд 16
Слайд 16 Слайд 17
Слайд 17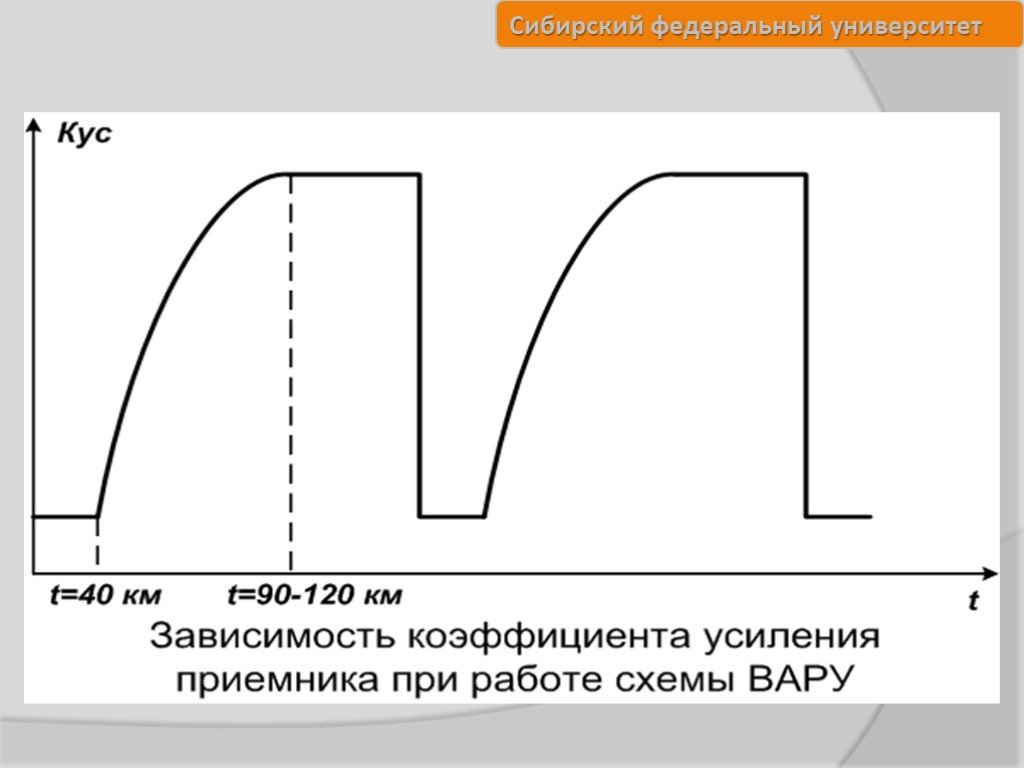 Слайд 18
Слайд 18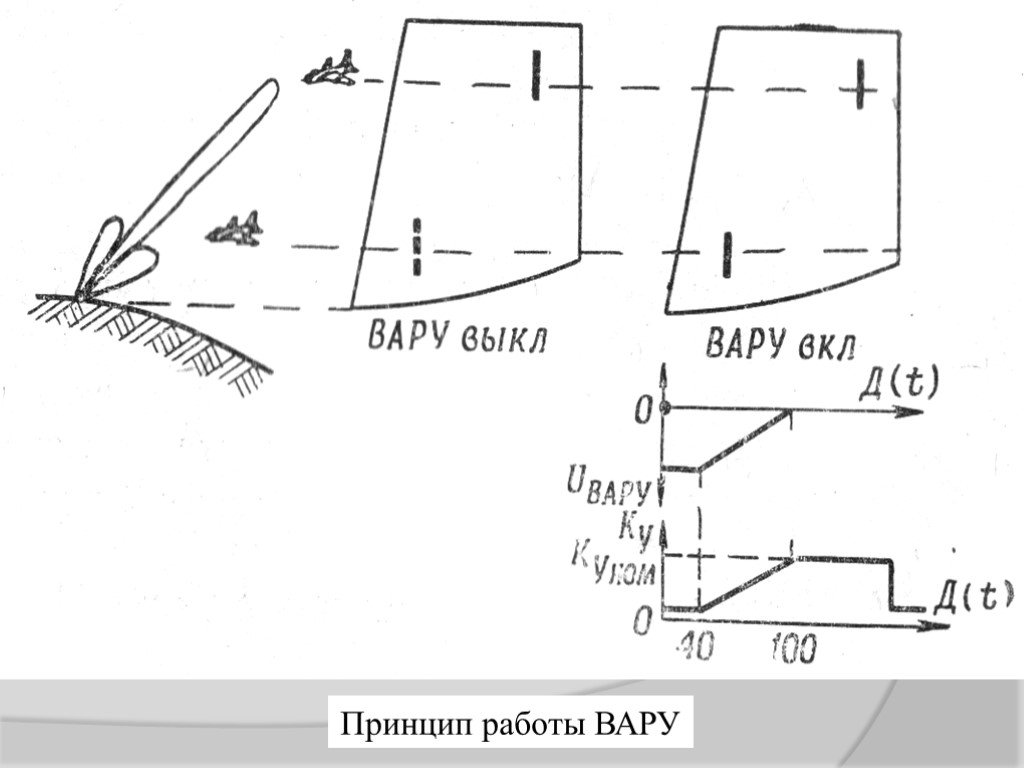 Слайд 19
Слайд 19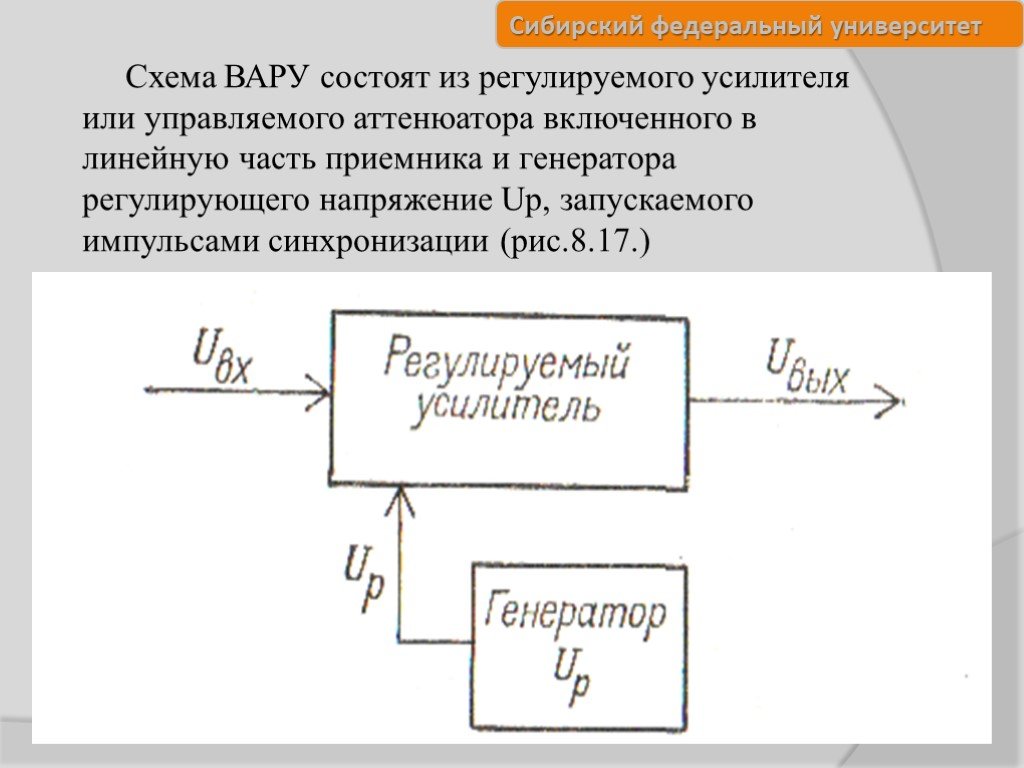 Слайд 20
Слайд 20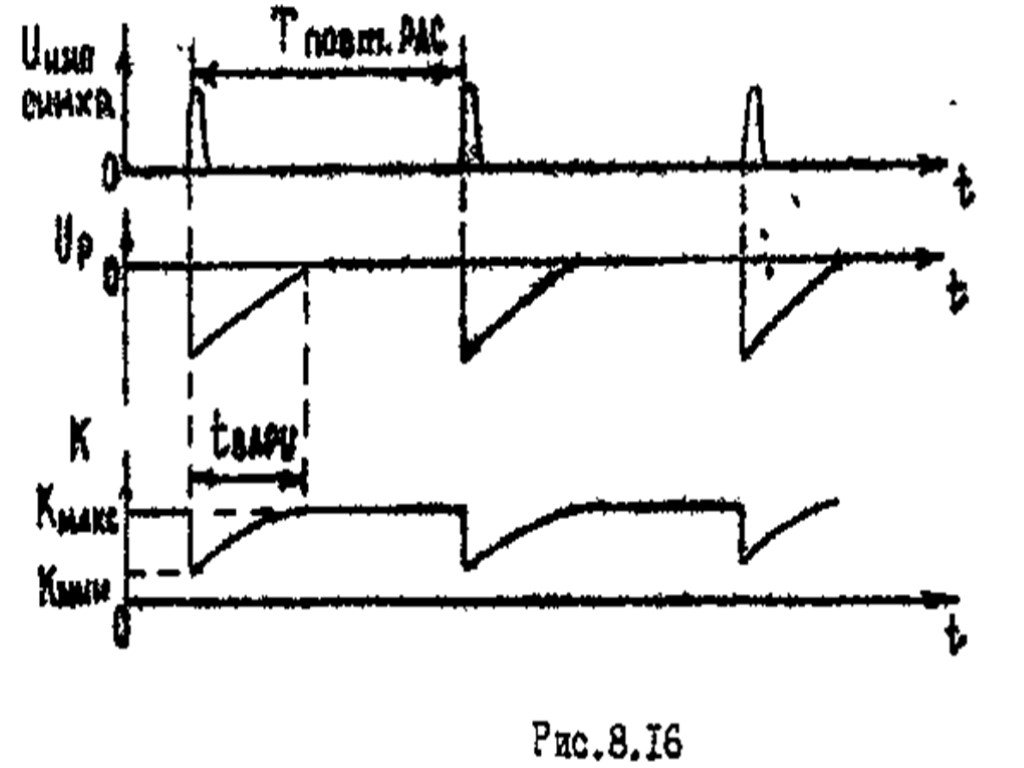 Слайд 21
Слайд 21 Слайд 22
Слайд 22 Слайд 23
Слайд 23 Слайд 24
Слайд 24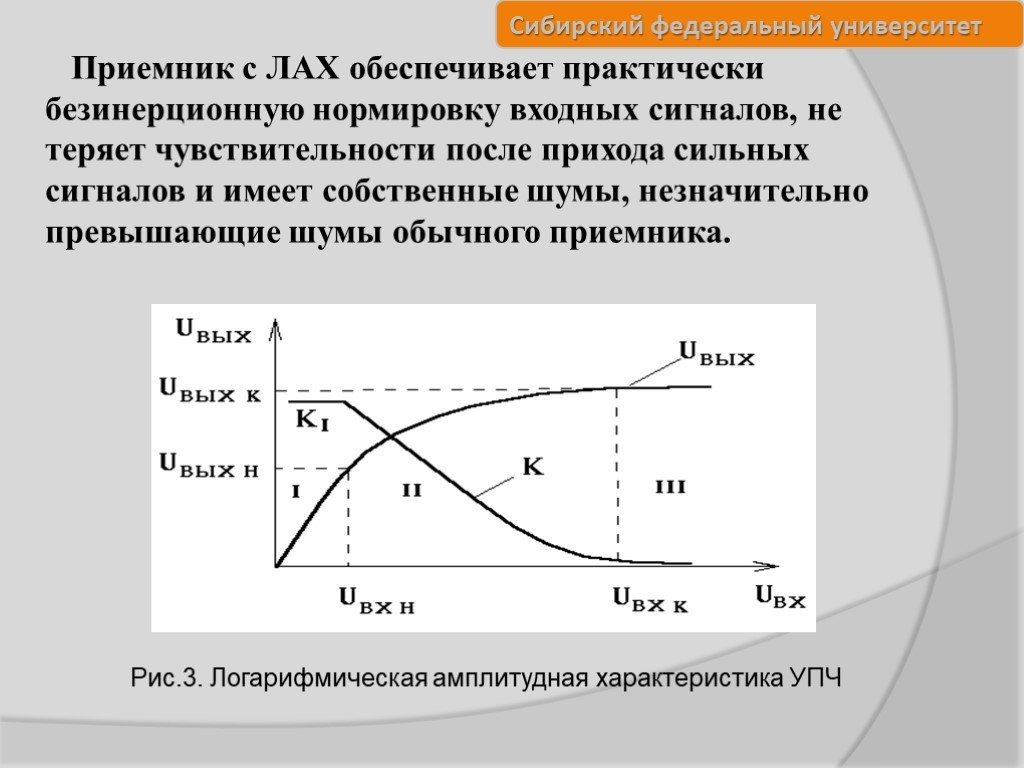 Слайд 25
Слайд 25 Слайд 26
Слайд 26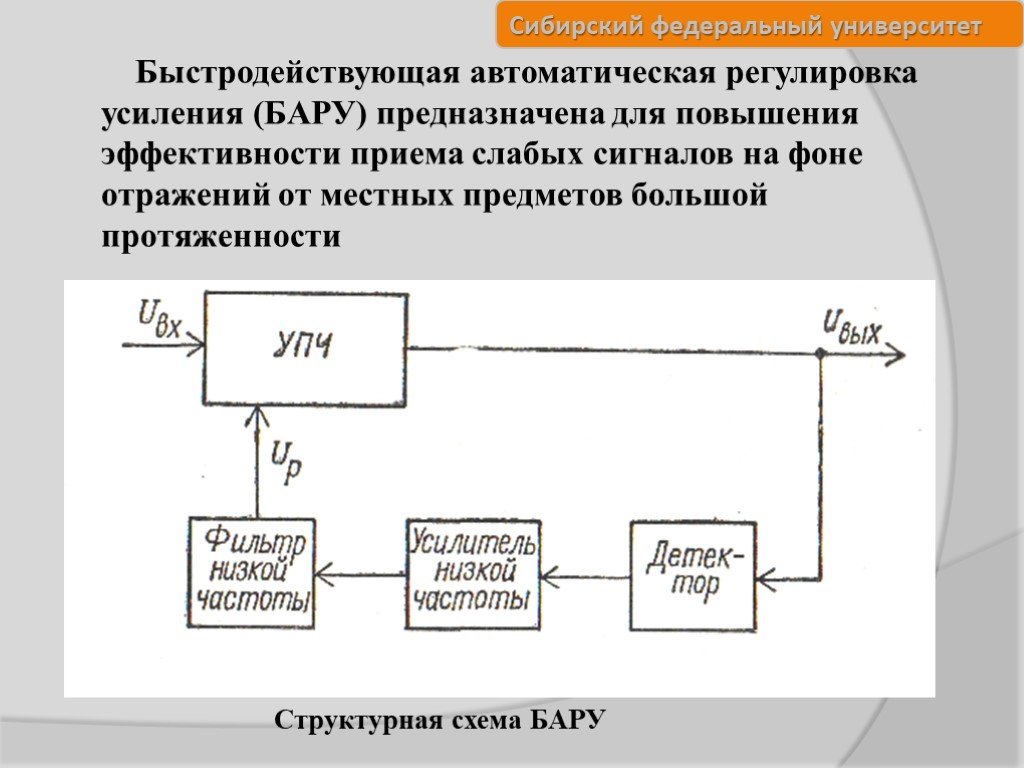 Слайд 27
Слайд 27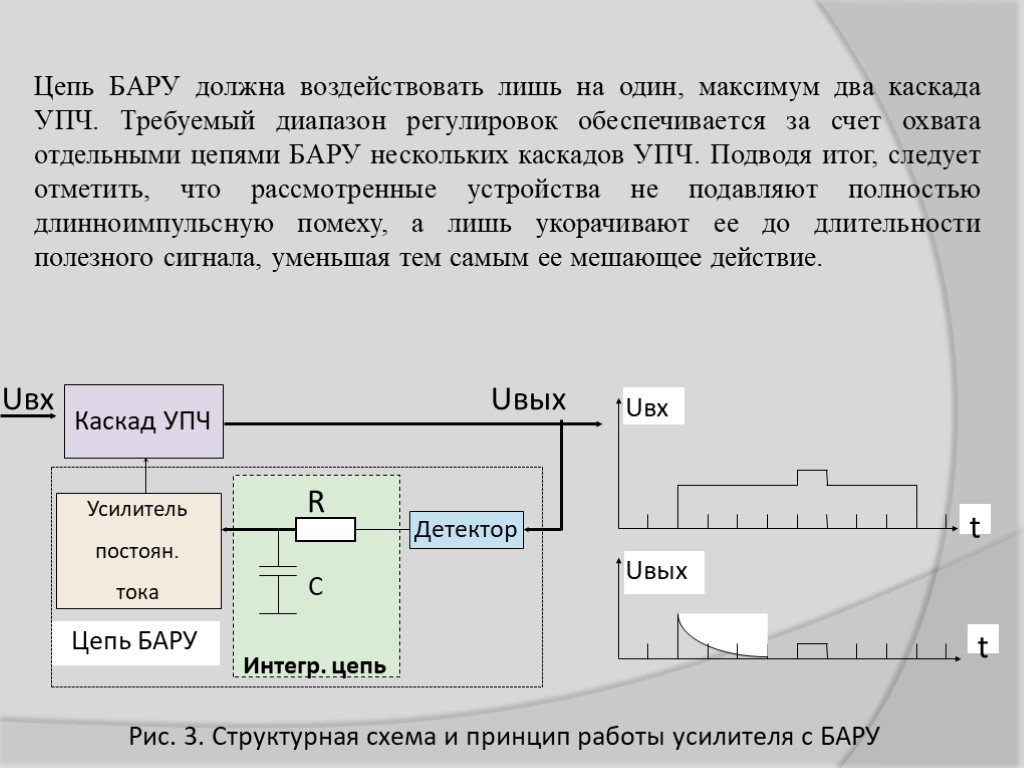 Слайд 28
Слайд 28 Слайд 29
Слайд 29 Слайд 30
Слайд 30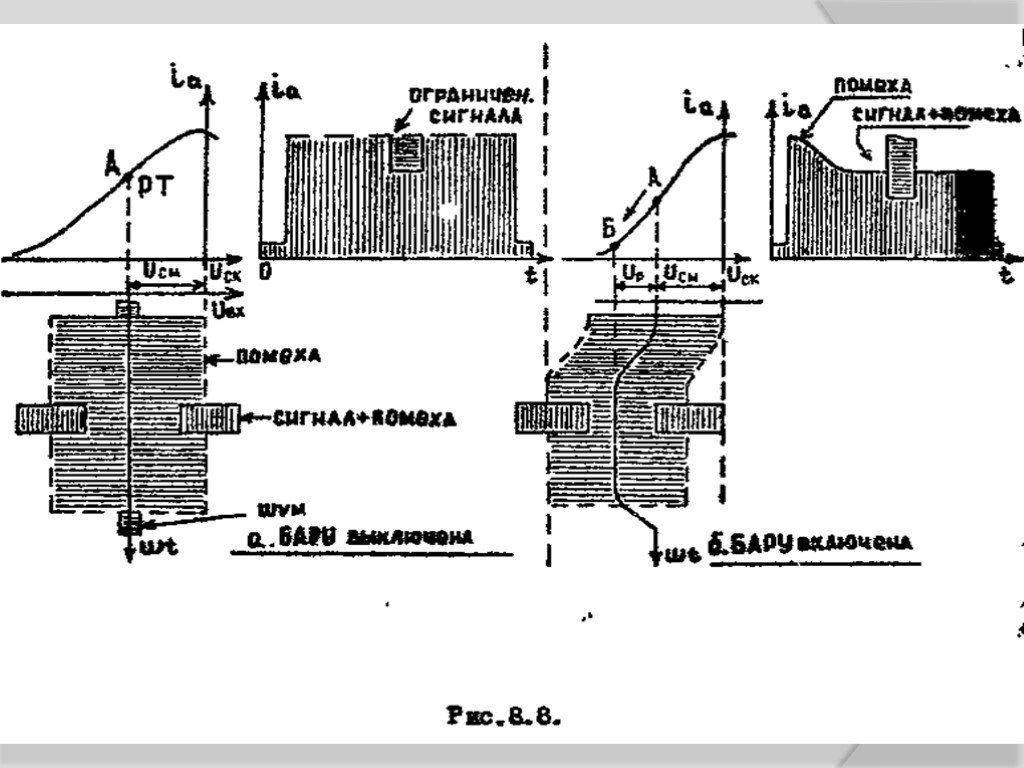 Слайд 31
Слайд 31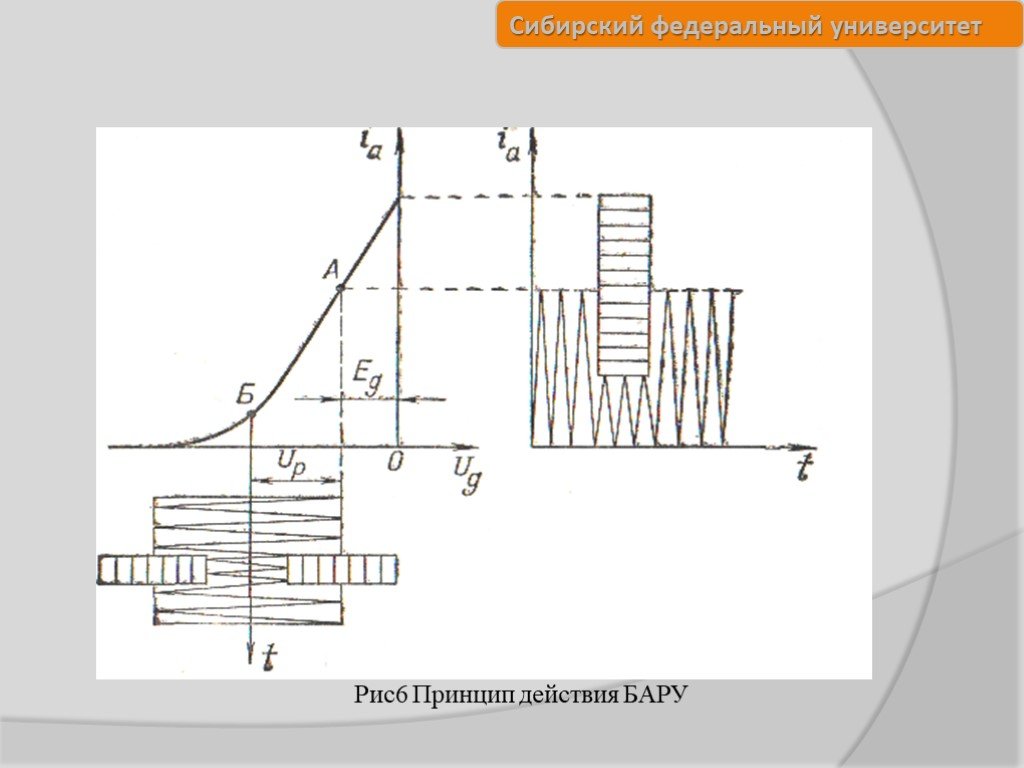 Слайд 32
Слайд 32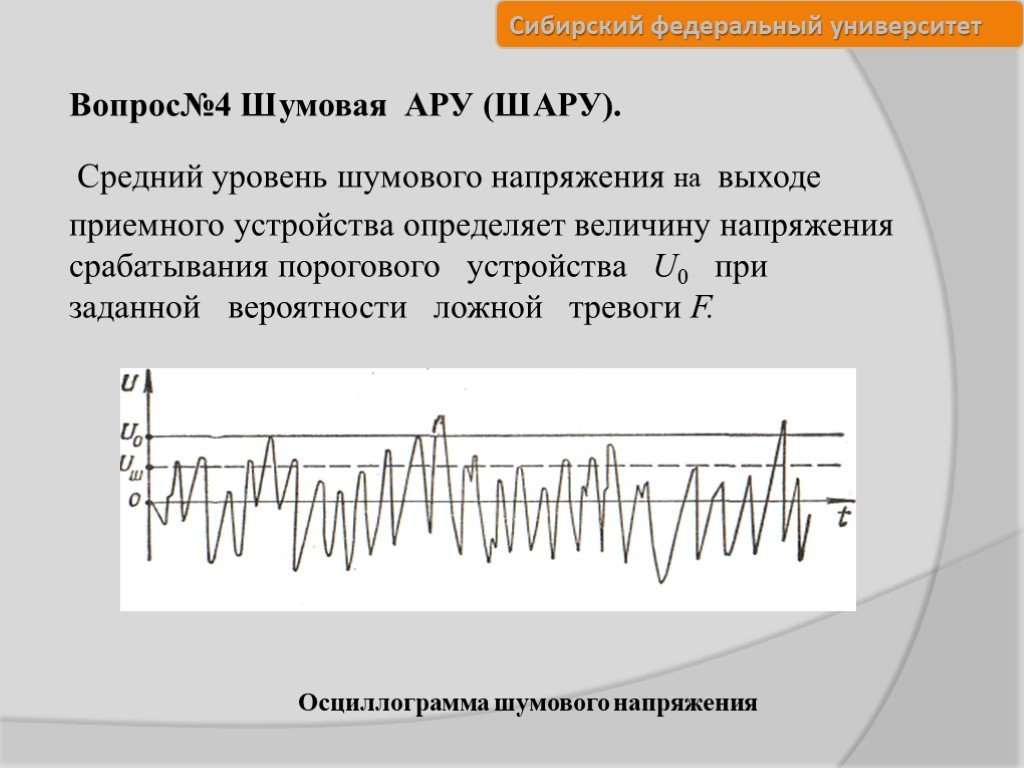 Слайд 33
Слайд 33 Слайд 34
Слайд 34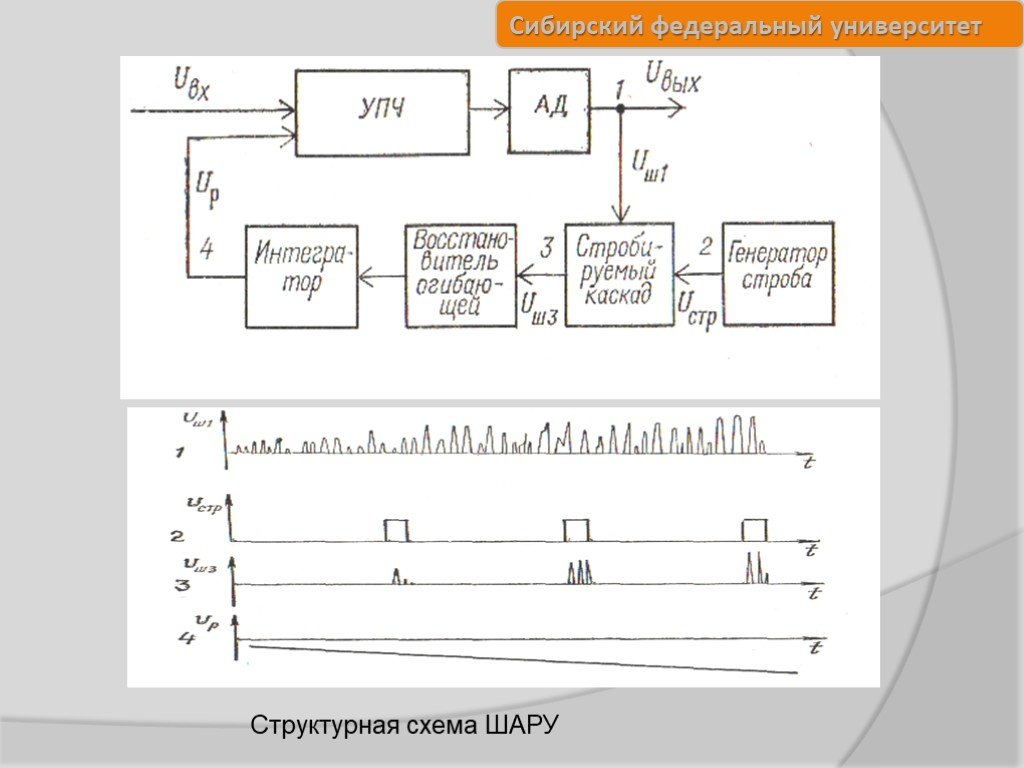 Слайд 35
Слайд 35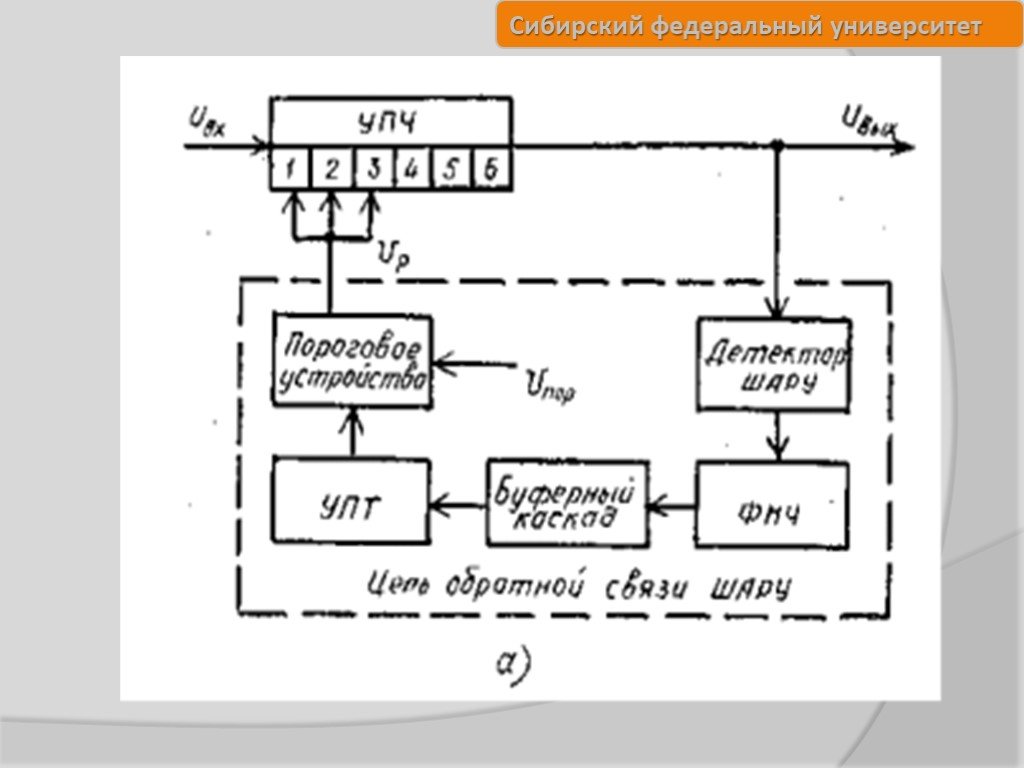 Слайд 36
Слайд 36 Слайд 37
Слайд 37 Слайд 38
Слайд 38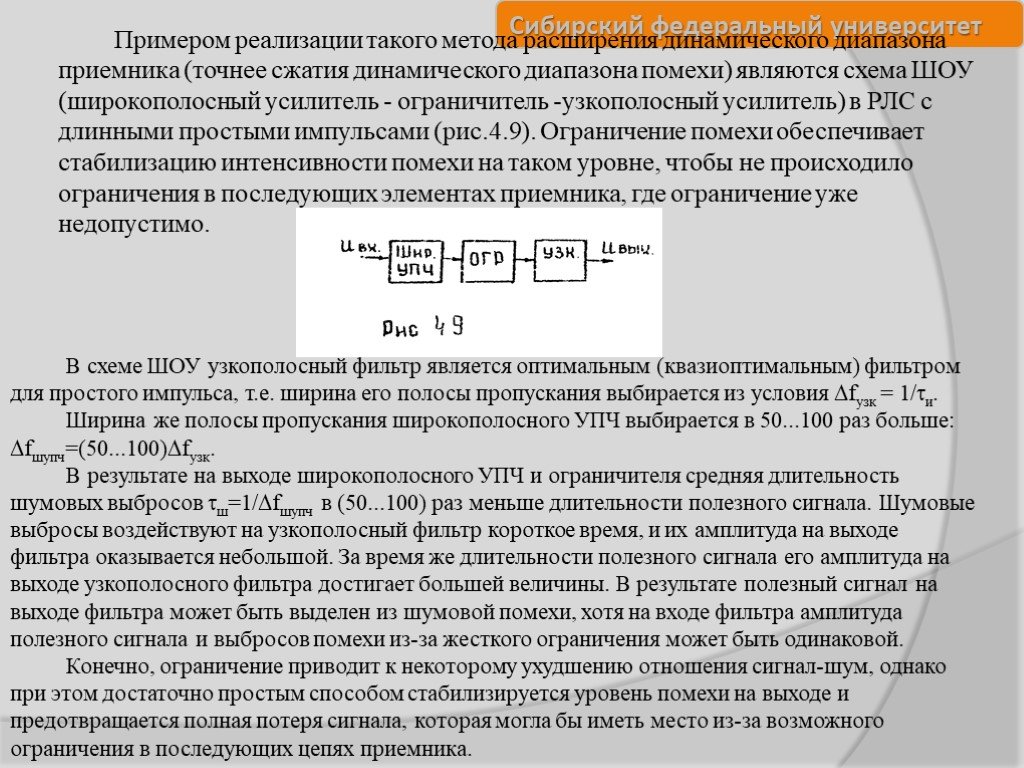 Слайд 39
Слайд 39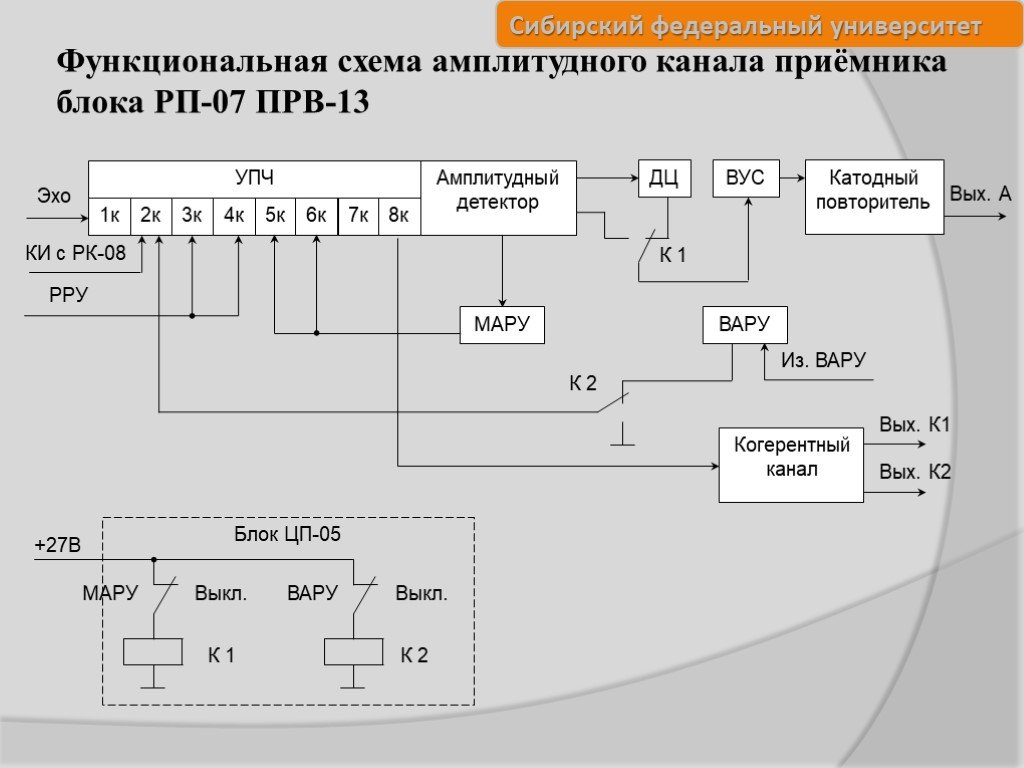 Слайд 40
Слайд 40 Слайд 41
Слайд 41




")























