Слайд 1Основы автоматизации производственных процессов
Слайд 2Основы теории автоматического управления
Теория автоматического управления - наука, которая изучает процессы управления, методы их исследования и основы проектирования автоматических систем. Для осуществления автоматического управления техническим процессом создается система, состоящая из управляемого объекта и связанного с ним управляющего устройства. Как и любое техническое сооружение, система должна обладать конструктивной жесткостью и динамической прочностью. Это означает, что система должна быть способной выполнять свои функции с требуемой точностью, несмотря на инерционные свойства и неизбежные помехи.
1
. Все системы автоматического управления и регулирования делятся на следующие основные классы: 1 .По основным видам уравнений динамики процессов управления: - линейные системы; - нелинейные системы. 2.Каждый из этих основных классов делится на: - системы с постоянными параметр")
Слайд 3Классификация САУ (САР)
Все системы автоматического управления и регулирования делятся на следующие основные классы: 1 .По основным видам уравнений динамики процессов управления: - линейные системы; - нелинейные системы. 2.Каждый из этих основных классов делится на: - системы с постоянными параметрами; - системы с переменными параметрами; - системы с распределенными параметрами; - системы с запаздыванием и т.д.
2
. Регулируемая величина (параметр) – это величина (параметр) технологического процесса, который необх")
Слайд 4Основные понятия ТАУ
Параметры технологического процесса - это физические величины, определяющие ход технологического процесса (напряжение, сила тока, давление, температура, частота вращения и т.д.). Регулируемая величина (параметр) – это величина (параметр) технологического процесса, который необходимо поддерживать постоянным или изменять по заданному закону. Объект управления (объект регулирования, ОУ) – устройство, требуемый режим работы которого должен поддерживаться извне специально организованными управляющими воздействиями. Управление – формирование управляющих воздействий, обеспечивающих требуемый режим работы ОУ.
3
 – устройство, тре")
Слайд 5Мгновенное значение – это значение регулируемой величины в рассматриваемый момент времени. Измеренное значение – это значение регулируемой величины, полученное в рассматриваемый момент времени с помощью некоторого измерительного прибора. Объект управления (объект регулирования, ОУ) – устройство, требуемый режим работы которого должен поддерживаться извне специально организованными управляющими воздействиями. Управление – формирование управляющих воздействий, обеспечивающих требуемый режим работы ОУ.
4
Слайд 6Регулирование – это частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной величины ОУ. Автоматическое управление – это управление, осуществляемое без непосредственного участия человека. Входное воздействие (X) – это воздействие, подаваемое на вход системы или устройства. Выходное воздействие (Y) – это воздействие, выдаваемое на выходе системы или устройства. Внешнее воздействие (F)– это воздействие внешней среды на систему.
5
Слайд 7Регулирование – это частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной величины ОУ.
Типовая структурная схема одноконтурной САУ.
6
Слайд 8G – задающее воздействие (входное воздействие Х) – воздействие на систему, определяющее заданный закон изменения регулируемой величины). u – управляющее воздействие – воздействие управляющего устройства на объект управления. УУ – управляющее устройство – устройство, осуществляющее воздействие на объект управления с целью обеспечения требуемого режима работы. F – возмущающее воздействие – воздействие, стремящееся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной. ε – ошибка управления (ε = х – у), разность между заданным (х) и действительным (у) значениями регулируемой величины.
7

Слайд 9Р – регулятор, это комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение ее по заданному закону. САР – система автоматического регулирования, это система с замкнутой цепью воздействия, в котором управление u вырабатывается в результате сравнения истинного значения у с заданным значением х. Дополнительная связь в структурной схеме САР , направленная от выхода к входу рассматриваемого участка цепи воздействий, называется обратной связью (ОС). Обратная связь может быть отрицательной или положительной.
8
: - стабилизирующая САР, это система, алгоритм функционирования которой содержит задание поддерживать регулируемую величину на постоянном значении (x = const); - программная САР, это система, алгоритм функционирования которой содерж")
Слайд 10Классификация САР
1. По назначению (по характеру изменения задания): - стабилизирующая САР, это система, алгоритм функционирования которой содержит задание поддерживать регулируемую величину на постоянном значении (x = const); - программная САР, это система, алгоритм функционирования которой содержит задание изменять регулируемую величину в соответствии с заранее заданной функцией (x изменяется программно); - следящая САР, это система, алгоритм функционирования которой содержит задание изменять регулируемую величину в зависимости от заранее неизвестной величины на входе САР (x = var).
9

Слайд 112. По количеству контуров: - одноконтурные - содержащие один контур, - многоконтурные - содержащие несколько контуров. 3. По числу регулируемых величин: - одномерные - системы с 1 регулируемой величиной, - многомерные - системы с несколькими регулируемыми величинами. Многомерные САР в свою очередь подразделяются на системы: а) несвязанного регулирования, в которых регуляторы непосредственно не связаны и могут взаимодействовать только через общий для них объект управления; б) связанного регулирования, в которых регуляторы различных параметров одного и того же технологического процесса связаны между собой вне объекта регулирования.
10
Слайд 124. По функциональному назначению: - температуры; - давления; - расхода; - уровня; - напряжения и т.д. 5. По характеру используемых для управления сигналов: - непрерывные, - дискретные (релейные, импульсные, цифровые). 6. По характеру математических соотношений: - линейные, для которых справедлив принцип суперпозиции; - нелинейные.
11
Слайд 13Принцип суперпозиции (наложения): Если на вход объекта подается несколько входных воздействий, то реакция объекта на сумму входных воздействий равна сумме реакций объекта на каждое воздействие в отдельности. 7. По виду используемой для регулирования энергии: - пневматические, - гидравлические, - электрические, - механические и др. 8. По принципу регулирования: - по отклонению; - по возмущению; - комбинированные – объединяют в себе особенности предыдущих САР.
12
Слайд 14Классификация элементов САР
1. По функциональному назначению: - измерительные, - усилительно-преобразовательные, - исполнительные, - корректирующие. 2. По виду энергии, используемой для работы: - электрические, - гидравлические, - пневматические, - механические, - комбинированные.
13
Слайд 153. По наличию или отсутствию вспомогательного источника энергии: - активные (с источником энергии), пассивные (без источника). 4. По характеру математических соотношений: - линейные - нелинейные.
14
Слайд 165. По поведению в статическом режиме: - статические, это системы в которых имеется однозначная зависимость между входным и выходным воздействиями. - астатические , это системы в которых эта зависимость отсутствует. Пример: Зависимость угла поворота ротора электродвигателя от приложенного напряжения. При подаче напряжения угол поворота будет постоянно расти, поэтому однозначной зависимости у него нет.
15
Слайд 17Характеристики и модели элементов и систем
Статической характеристикой элемента называется зависимость установившихся значений выходной величины от значения величины на входе системы. Статическим называется элемент, у которого при постоянном входном воздействии с течением времени устанавливается постоянная выходная величина. Например, при подаче на вход нагревателя различных значений напряжения он будет нагреваться до соответствующих этим напряжениям значений температуры.
16
Слайд 18Астатическим называется элемент, у которого при постоянном входном воздействии сигнал на выходе непрерывно растет с постоянной скоростью, ускорением и т.д. Линейным статическим элементом называется безинерционный элемент, обладающий линейной статической характеристикой.
17
Слайд 19САР называется статической, если при постоянном входном воздействии ошибка управления ε стремится к постоянному значению, зависящему от величины воздействия. САР называется астатической, если при постоянном входном воздействии ошибка управления ε стремится к нулю вне зависимости от величины воздействия.
18
Слайд 20Динамические характеристики
Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие при нулевых начальных условиях, т.е. при х(0) = 0 и у(0) = 0. Импульсной характеристикой (t) называется реакция объекта на -функцию при нулевых начальных условиях. Частотной характеристикой (ЧХ, АФЧХ и др.) называется зависимость амплитуды и фазы выходного сигнала системы в установившемся режиме при приложении на входе гармонического воздействия.
19
Слайд 21Дифференциальные уравнения
Любые процессы передачи, обмена, преобразования энергии и вещества математически можно описать в виде дифференциальных уравнений (ДУ). Любые процессы в САР также принято описывать дифференциальными уравнениями, которые определяют сущность происходящих в системе процессов независимо от ее конструкции и т.д. Решив ДУ, можно найти характер изменения регулируемой переменной в переходных и установившихся режимах при различных воздействиях на систему.
20
Слайд 22х = х - х0 у = у - у0
F(х,у) = 0 21
Слайд 23Преобразования Лапласа
Прямое преобразование Лапласа
Обратное преобразование Лапласа
22
Слайд 24Передаточные функции
Передаточной функцией называется отношение изображения выходного воздействия Y(s) к изображению входного X(s) при нулевых начальных условиях.
Передаточная функция является дробно-рациональной функцией комплексной переменной:
23
Слайд 25Типовые звенья САР
- усилительное
Передаточная функция
- идеально интегрирующее
Выходная величина
24
Слайд 26- реальное интегрирующее
- идеально дифференцирующее
25
Слайд 27- реальное дифференцирующее
- апериодическое
Дифференциальное уравнение
26
Слайд 28- колебательное - запаздывающее 27
Слайд 29Соединения звеньев
Последовательное соединение
28
Слайд 30Параллельное соединение
29
Слайд 31Обратная связь
«+» соответствует отрицательной ОС «-» - положительной.
30
Слайд 32Передаточные функции САР
1) Для нахождения передаточной функции CAP в разомкнутом состоянии необходимо разомкнуть систему путем отбрасывания входного сумматора. Возмущающее воздействие F приравнивается нулю. Система звеньев между точками разрыва образует разомкнутую систему. 2) Передаточная функция замкнутой системы по задающему воздействию находится как отношение изображений выходного сигнала к изображению входного (задающего), с применением принципа суперпозиции, т.е. принимается, что возмущающий фактор отсутствует F(t)=0. 3) Передаточная функция замкнутой системы по возмущающему фактору записывается с применением принципа суперпозиции, т.е. принимаем, что входное воздействие отсутствует .
31
Слайд 33Ошибка системы 32
Слайд 34Коэффициенты ошибок
33
Слайд 35Коэффициент С0 принято называть коэффициентом статической или позиционной ошибки; коэффициент С1 - коэффициентом скоростной ошибки; С2 - коэффициентом ошибки от ускорения.
34
Слайд 37Критерий устойчивости Михайлова
Характеристический полином
36
Слайд 38При изменении частоты ω вектор D(jω), изменяясь по величине и направлению, будет описывать своим концом в комплексной плоскости некоторую кривую, называемую кривой (годографом) Михайлова. Если же значение частоты ω менять непрерывно от нуля до бесконечности, то вектор будет изменяться по величине и по направлению, описывая своим концом некоторую кривую (годограф), которая называется кривой Михайлова.
37

Слайд 40Для того чтобы система автоматического управления была устойчива , необходимо и достаточно , чтобы вектор кривой Михайлова D(jω) при изменении ω от 0 до ∞ повернулся , нигде не обращаясь в ноль , вокруг начала координат против часовой стрелки на угол πn/2, где n-порядок характеристического уравнения. Для то чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы кривая (годограф) Михайлова при изменении частоты ω от 0 до ∞, начинаясь при ω =0 на вещественной положительной полуоси, обходила только против часовой стрелки последовательно квадрантов координатной плоскости, где - порядок характеристического уравнения.
39
Слайд 41Кривые Михайлова 40
Слайд 42Критерий устойчивости Найквиста
Критерий позволяет по амплитудно-фазовой частотной характеристике разомкнутой системы W(j ω) судить об устойчивости замкнутой системы. Для того чтобы замкнутая САУ была устойчива, необходимо и достаточно, чтобы при изменении частоты ω от 0 до ∞ вектор, начало которого находится в точке (-1, j0), а конец на амплитудно-фазовой частотной характеристике разомкнутой системы W(j ω),повернулся бы в положительном направлении (против часовой стрелки) на угол πk, где k- число правых корней характеристического уравнения разомкнутой системы, т.е. чтобы характеристика W(j ω) охватила точку (-1, j0) в положительном направлении k/2 раз.
41
 , то система устойчива и формулировка критерия устойчивости Найквиста упрощается. Если разомкнутая система устойчива, то для того чтобы замкнутая САУ была устойчива, необходимо и достаточно, чтобы амплитудно-фазовая частотная характерис")
Слайд 43Если k = 0 частотная характеристика не охватывает точку (-1,j0) , то система устойчива и формулировка критерия устойчивости Найквиста упрощается. Если разомкнутая система устойчива, то для того чтобы замкнутая САУ была устойчива, необходимо и достаточно, чтобы амплитудно-фазовая частотная характеристика разомкнутой системы W(j ω) при изменении ω от 0 до ∞ не охватывала точку (-1, j0).
42
Слайд 44Амплитудно-фазовая характеристика разомкнутой системы
43
Слайд 45Амплитудно-фазовые характеристики разомкнутой системы
44
Слайд 46Логарифмические характеристики разомкнутой системы
45
Слайд 47Критерий устойчивости Гурвица
Для устойчивой системы необходимо и достаточно, чтобы определитель и все главные диагональные миноры матрицы были больше нуля. Если хотя бы один определитель будет равен нулю, то система будет находится на границе устойчивости.
46
Слайд 48Запасы устойчивости системы
Годограф W(j ω) 47
Слайд 49Показатели качества
1) прямые - определяемые непосредственно по кривой переходного процесса, 2) корневые - определяемые по корням характеристического полинома, 3) частотные - по частотным характеристикам, 4) интегральные - получаемые путем интегрирования функций.
48
Слайд 50Оценки качества переходной характеристики
Формула Хевисайда
Перерегулирование
49
Слайд 52Переходная характеристика
51
Слайд 53Степень затухания
Статическая ошибка
εст = х - xуст
Время регулирования (время переходного процесса) TП определяется следующим образом: Находится допустимое отклонение = 5% xуст и строятся асимптоты ± Время TП соответствует последней точке пересечения x(t) с данной границей. То есть время, когда колебания регулируемой величины перестают превышать 5 % от установившегося значения.
52
Слайд 54Корневые показатели качества
Степень устойчивости
Степень колебательности
53
Слайд 55Типы регуляторов
1) П-регулятор (пропорциональный регулятор)
W(s) = K
2) И-регулятор (интегрирующий регулятор)
3) Д-регулятор (дифференцирующий регулятор)
W(s) = K s.
4) ПИ-регулятор (пропорционально-интегральный регулятор)
54
Слайд 565) ПД-регулятор (пропорционально-дифференциальный регулятор)
55
Слайд 576) ПИД-регулятор (пропорционально-интегро- дифференциальный регулятор)
56
 Слайд 1
Слайд 1 Слайд 2
Слайд 2 Слайд 3
Слайд 3 Слайд 4
Слайд 4 Слайд 5
Слайд 5 Слайд 6
Слайд 6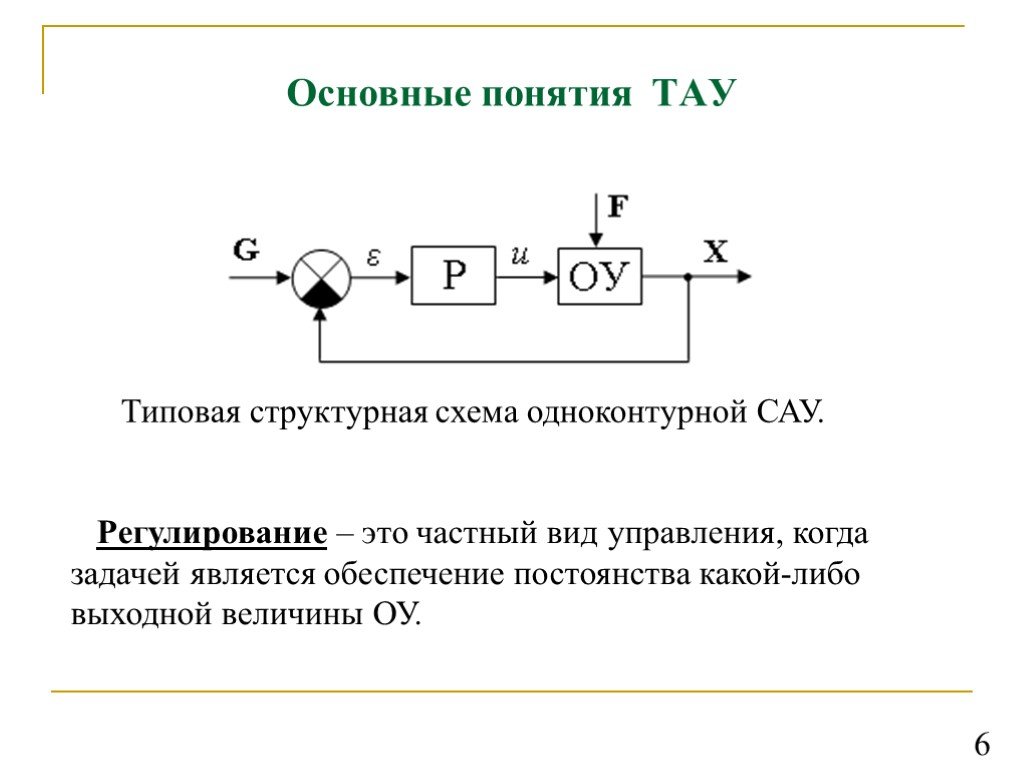 Слайд 7
Слайд 7 Слайд 8
Слайд 8 Слайд 9
Слайд 9 Слайд 10
Слайд 10 Слайд 11
Слайд 11 Слайд 12
Слайд 12 Слайд 13
Слайд 13 Слайд 14
Слайд 14 Слайд 15
Слайд 15 Слайд 16
Слайд 16 Слайд 17
Слайд 17 Слайд 18
Слайд 18 Слайд 19
Слайд 19 Слайд 20
Слайд 20 Слайд 21
Слайд 21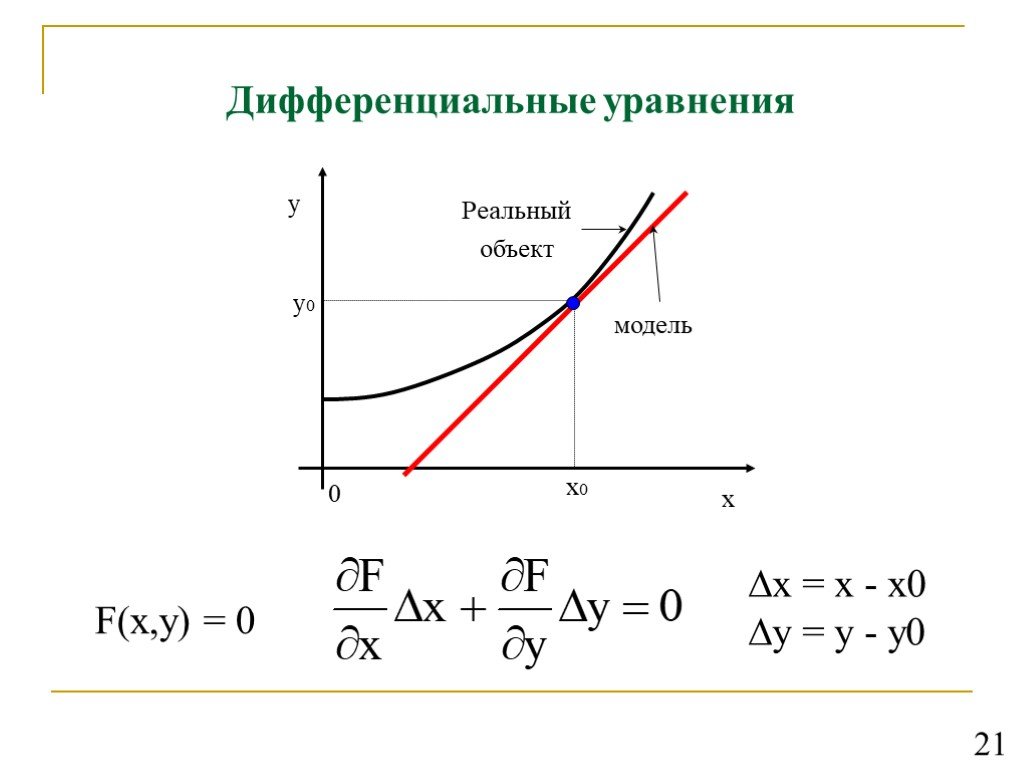 Слайд 22
Слайд 22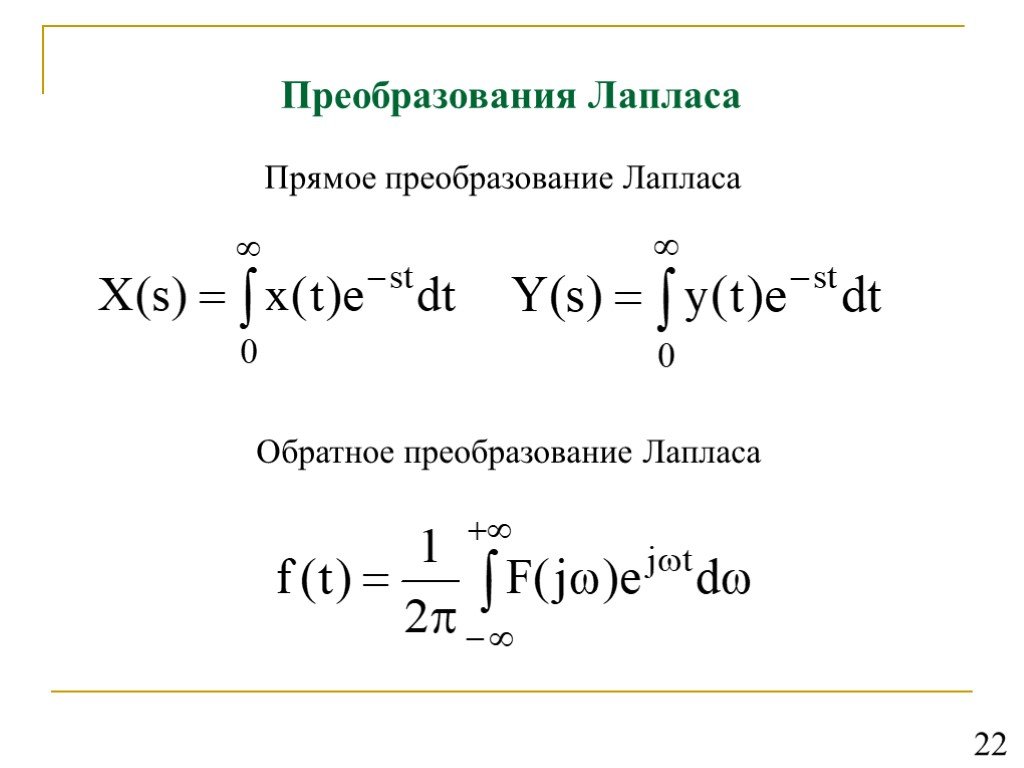 Слайд 23
Слайд 23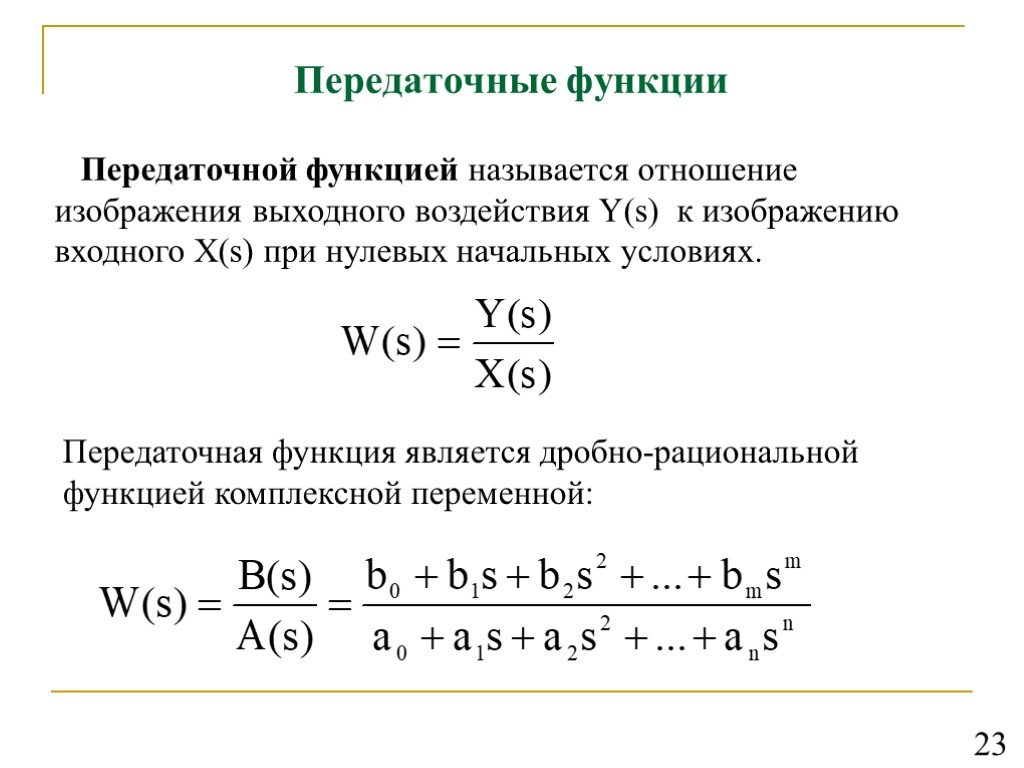 Слайд 24
Слайд 24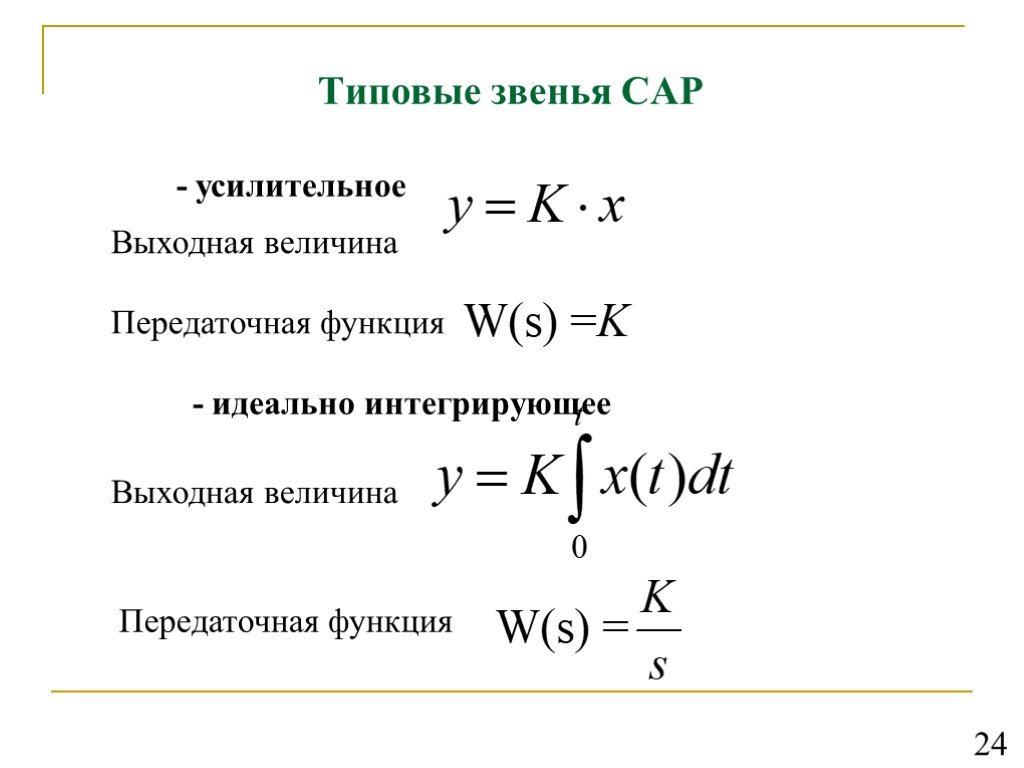 Слайд 25
Слайд 25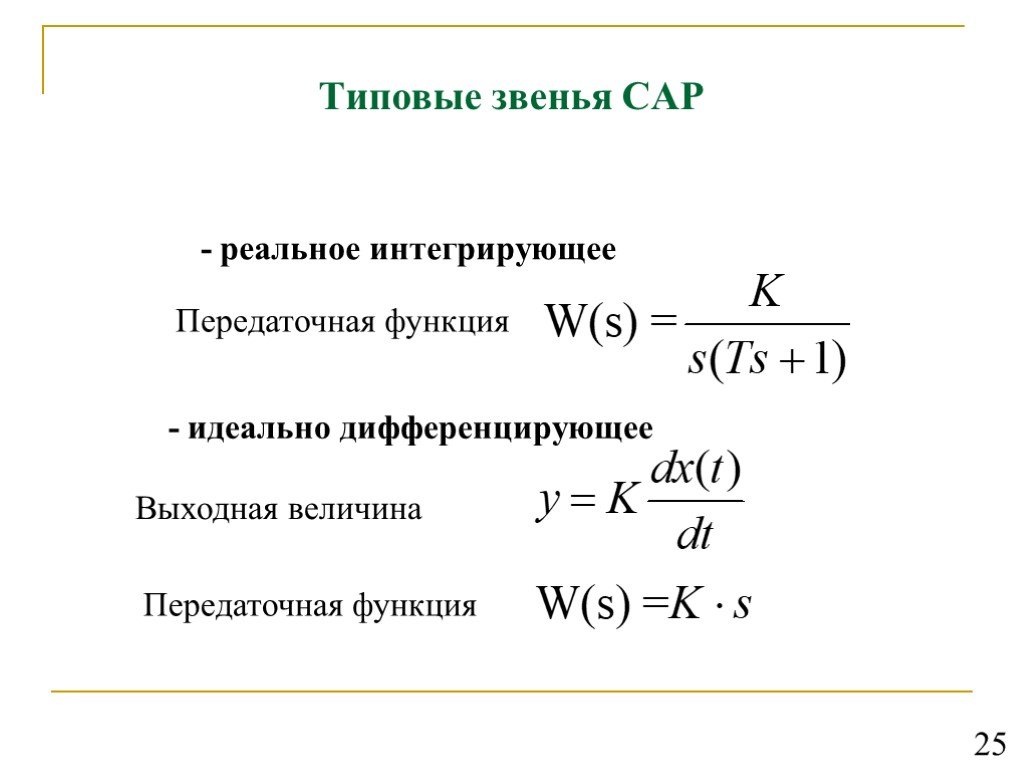 Слайд 26
Слайд 26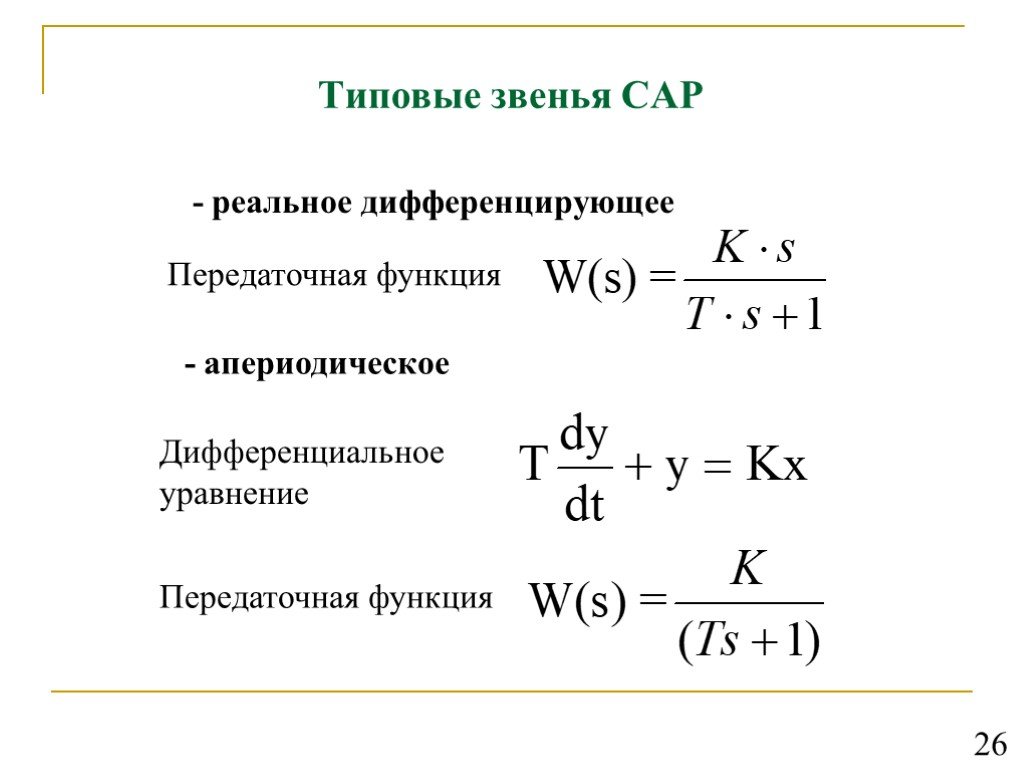 Слайд 27
Слайд 27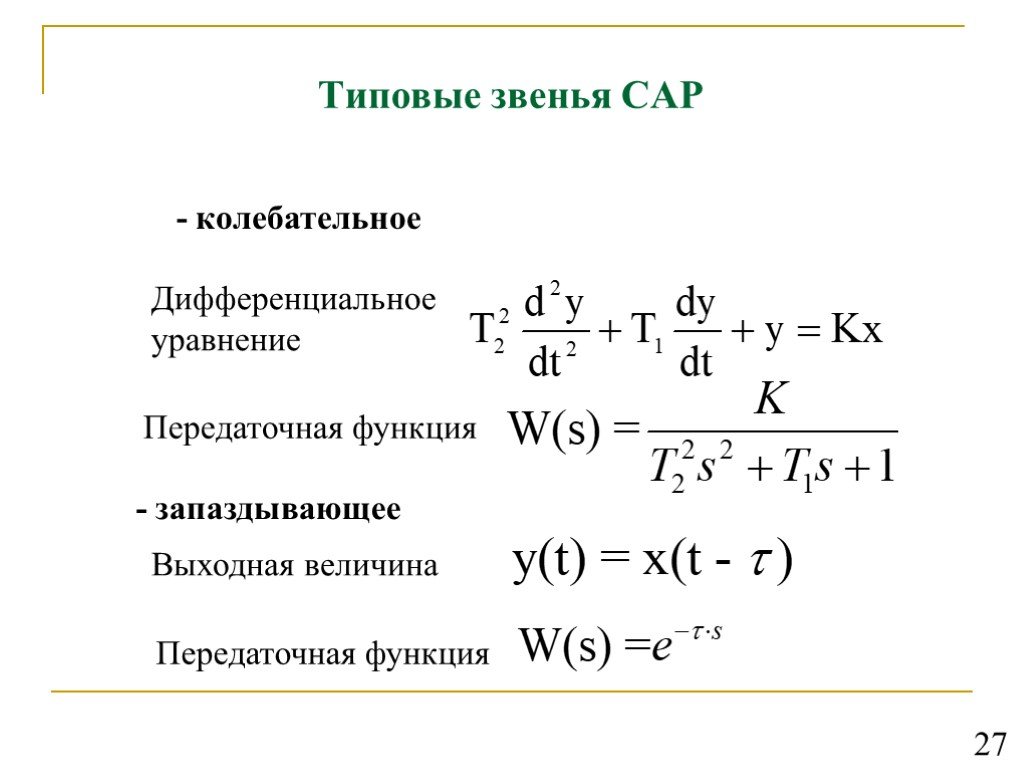 Слайд 28
Слайд 28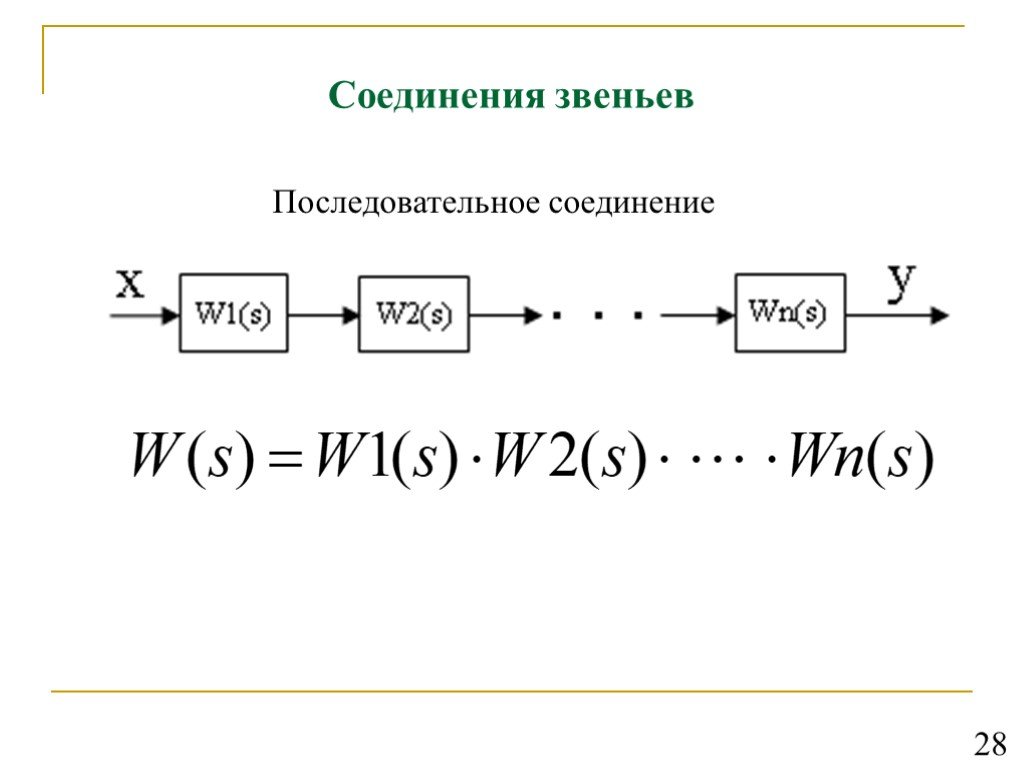 Слайд 29
Слайд 29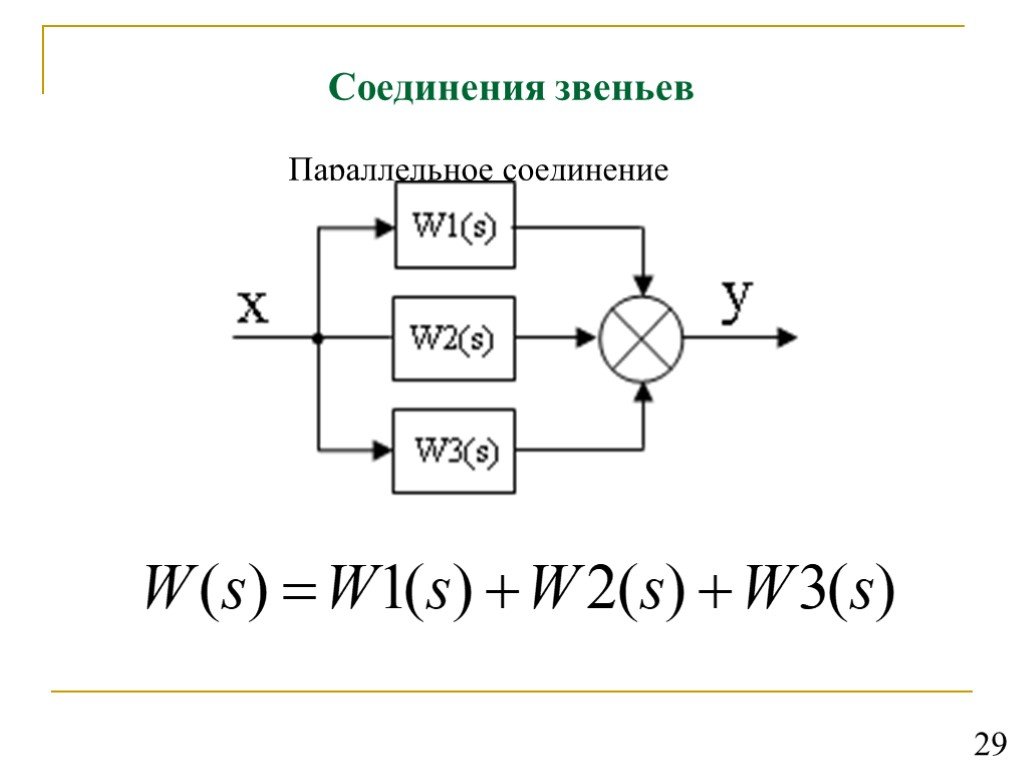 Слайд 30
Слайд 30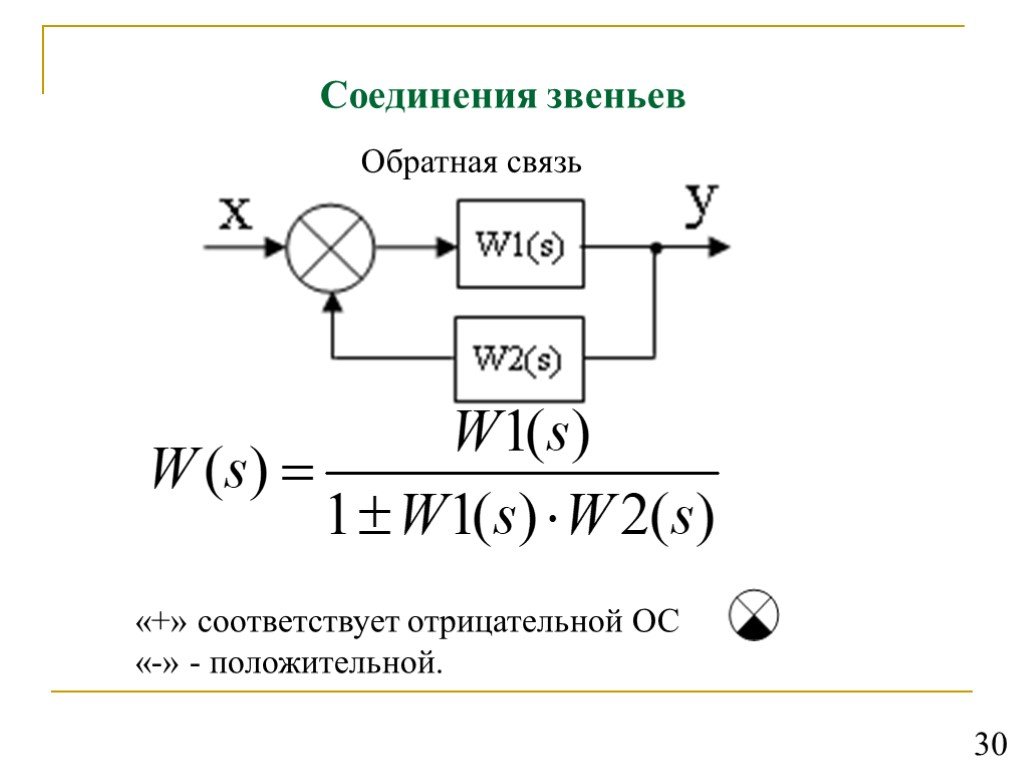 Слайд 31
Слайд 31 Слайд 32
Слайд 32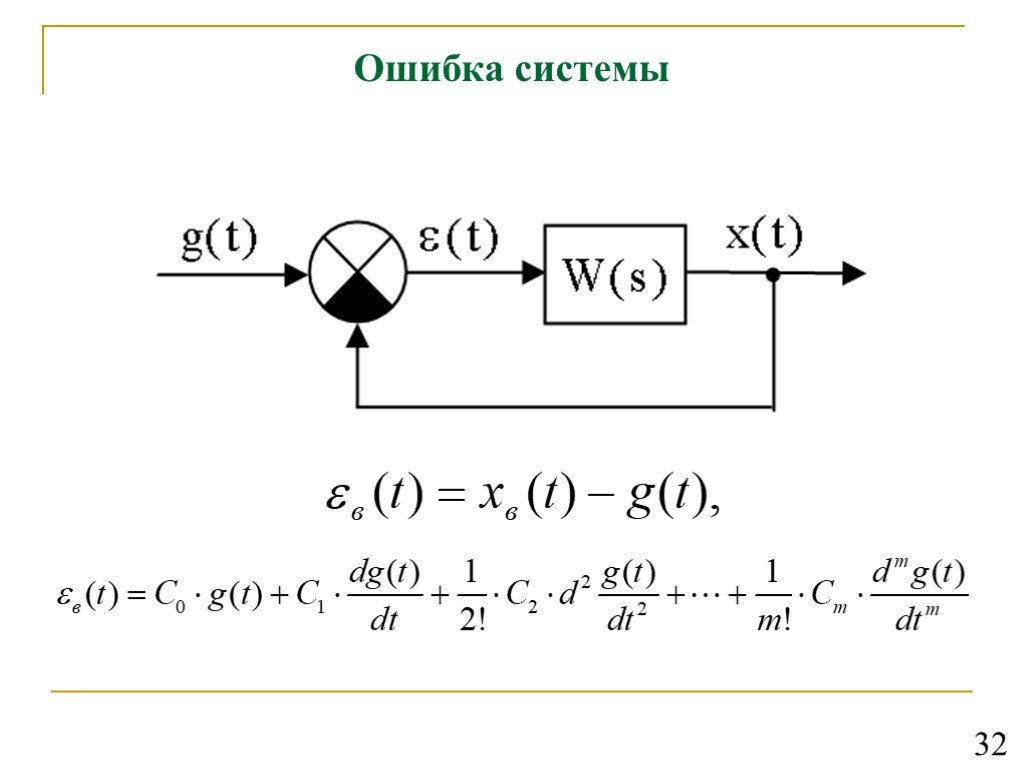 Слайд 33
Слайд 33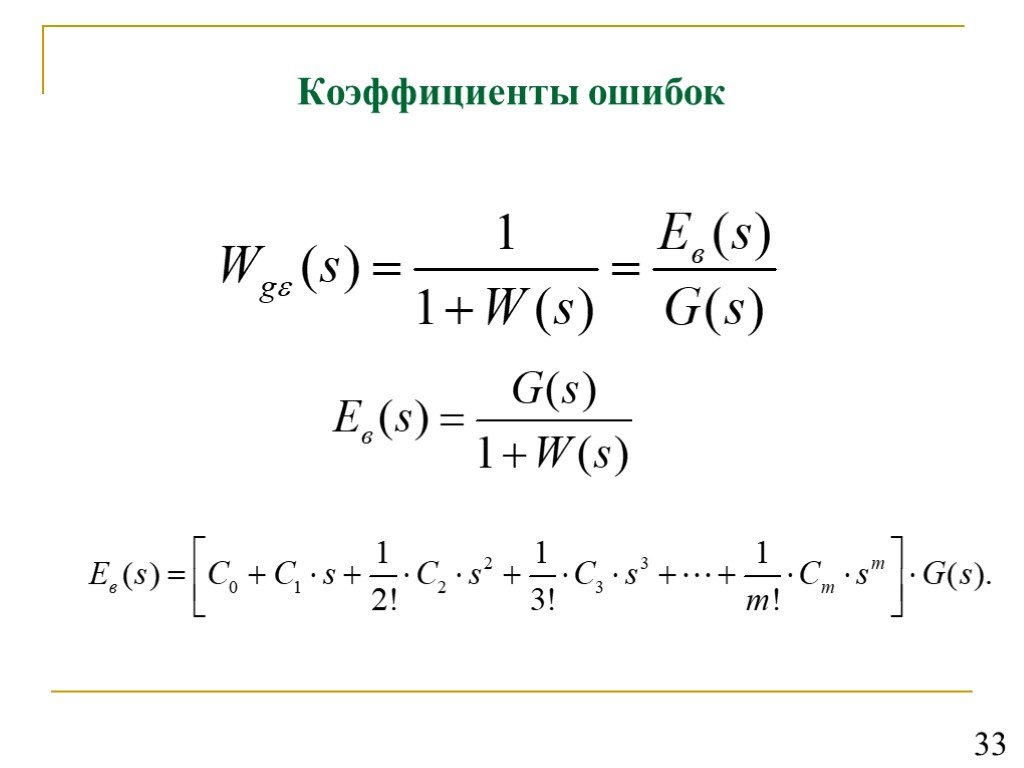 Слайд 34
Слайд 34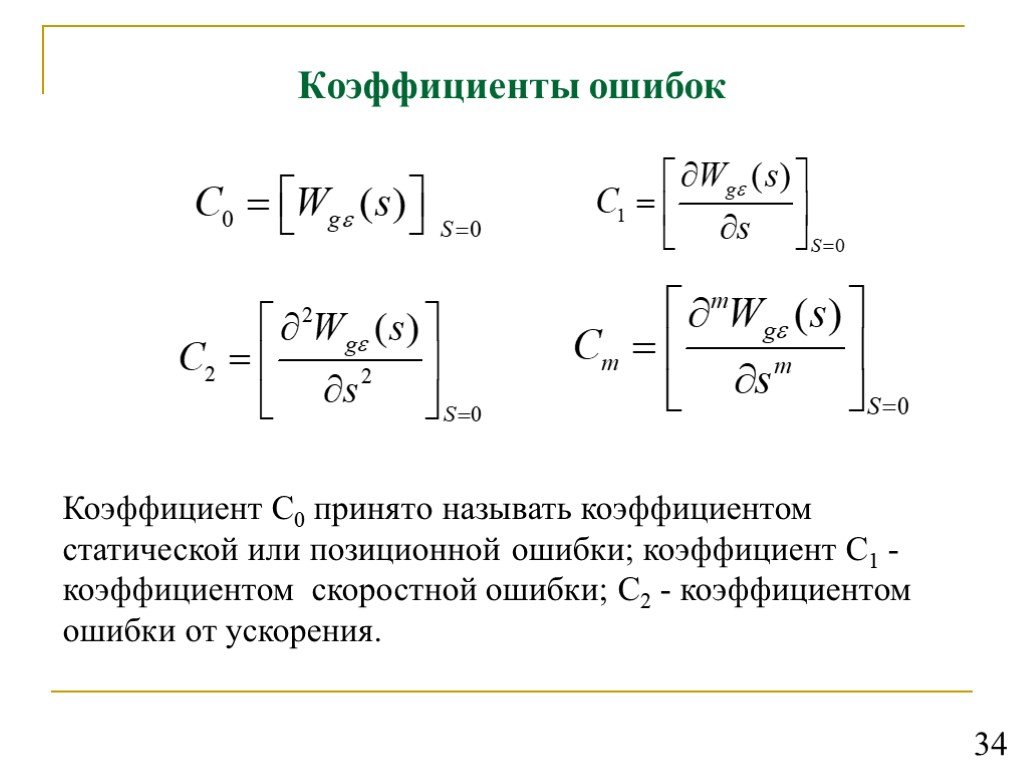 Слайд 35
Слайд 35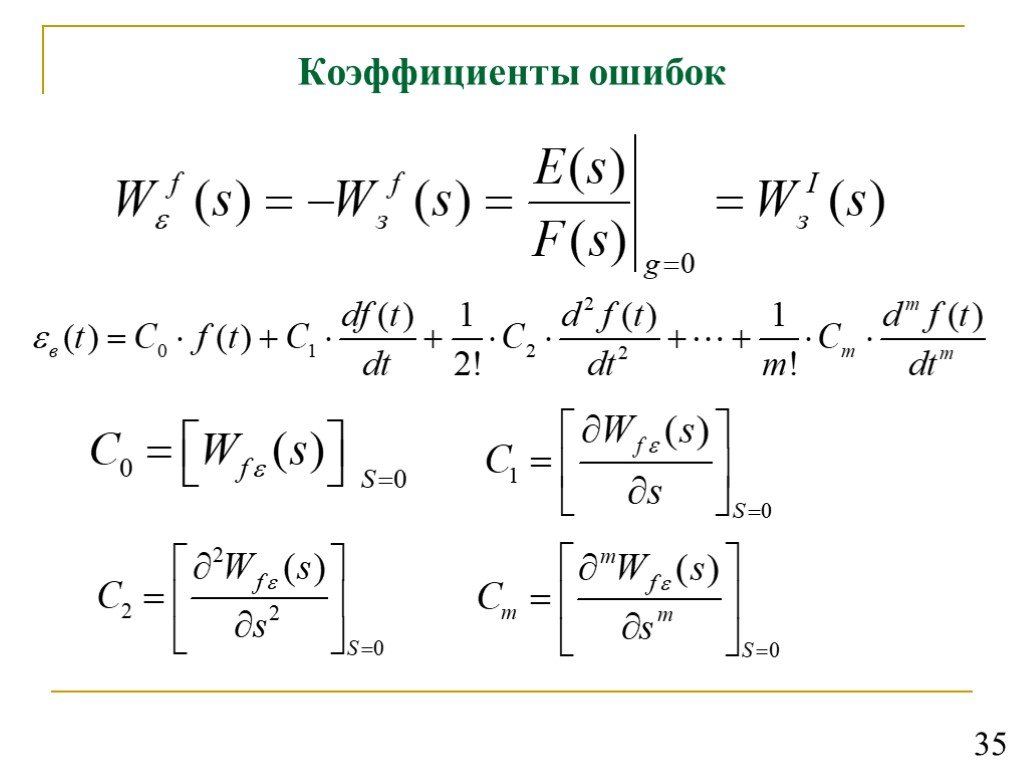 Слайд 36
Слайд 36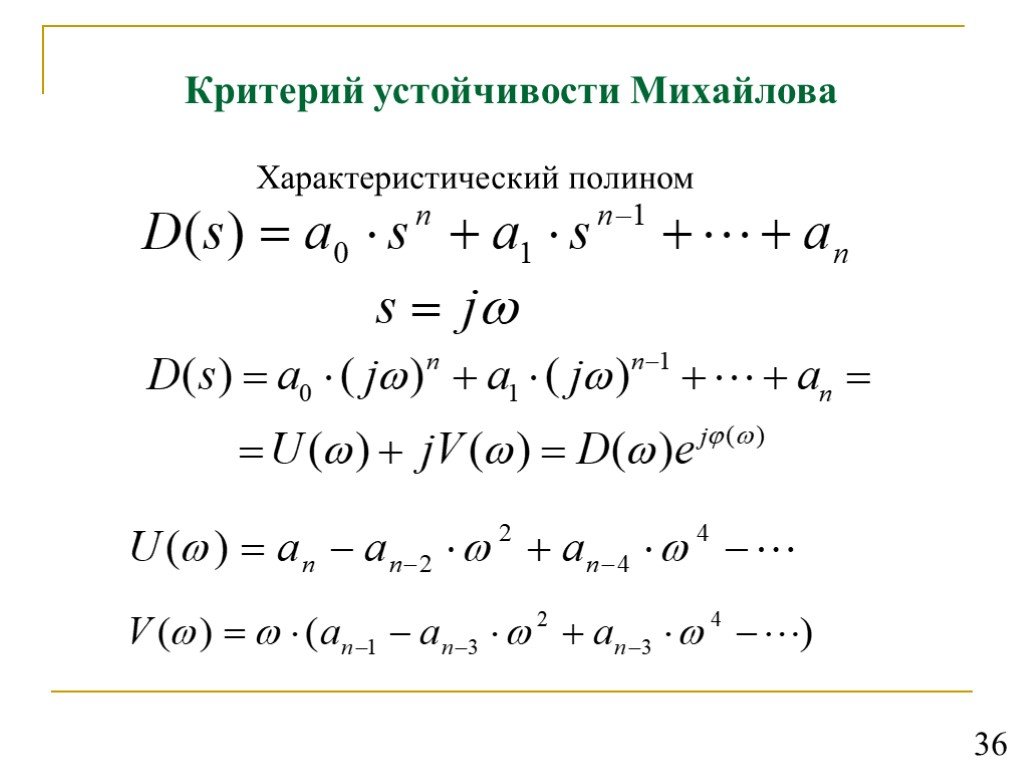 Слайд 37
Слайд 37 Слайд 38
Слайд 38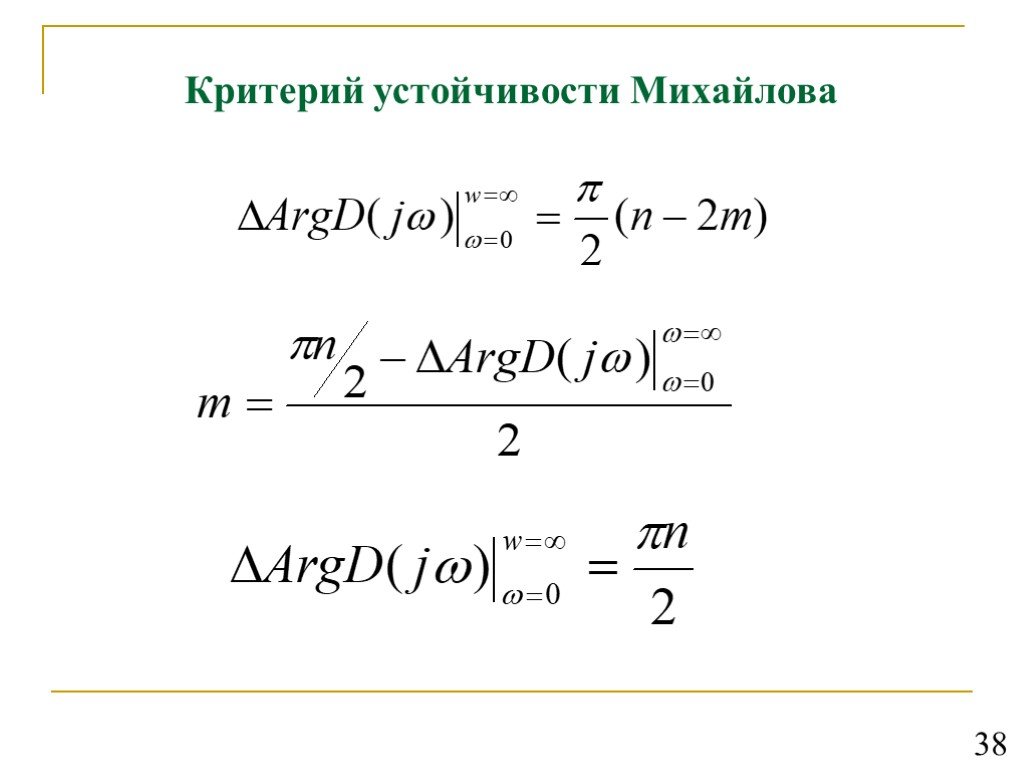 Слайд 39
Слайд 39 Слайд 40
Слайд 40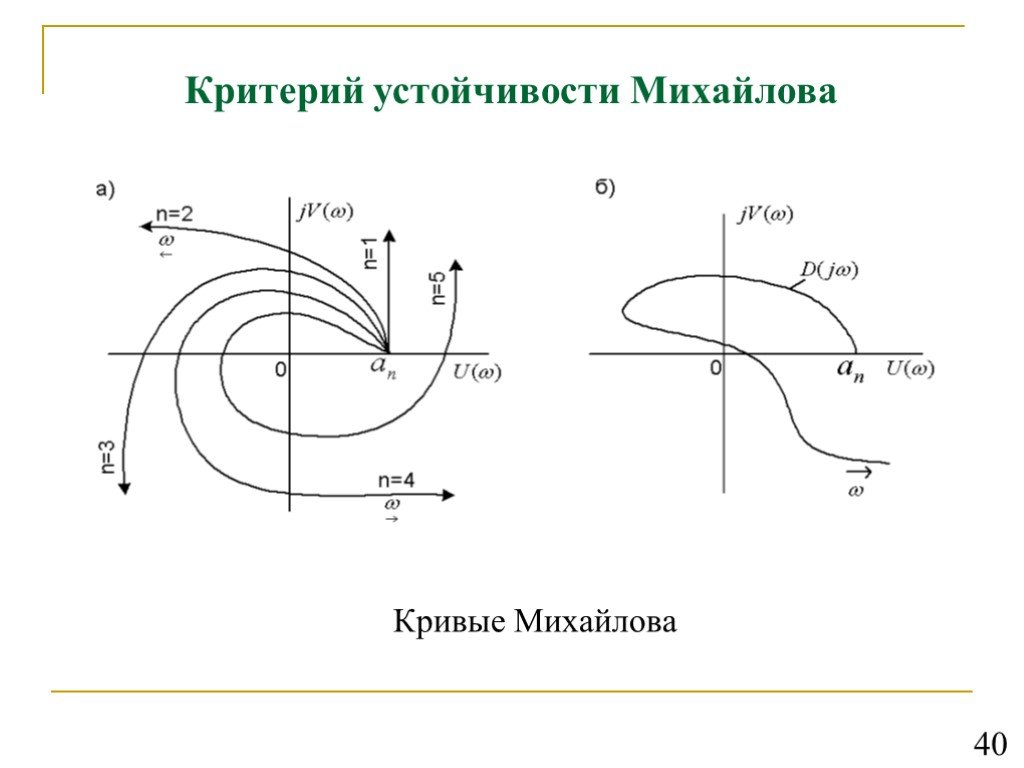 Слайд 41
Слайд 41 Слайд 42
Слайд 42 Слайд 43
Слайд 43 Слайд 44
Слайд 44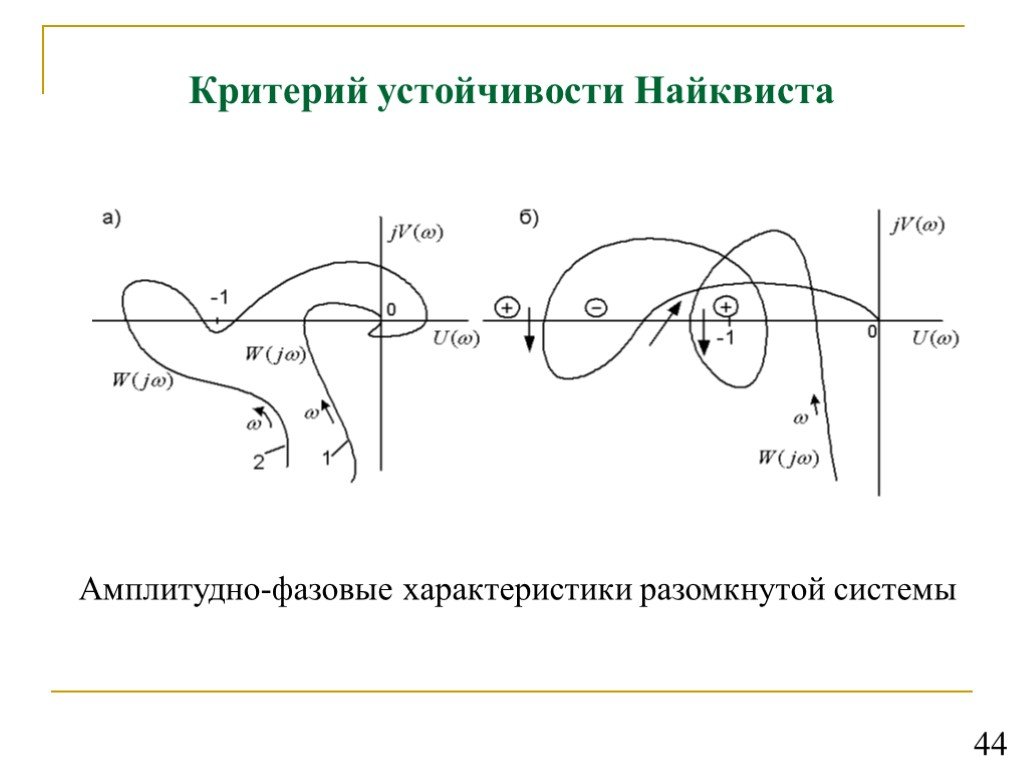 Слайд 45
Слайд 45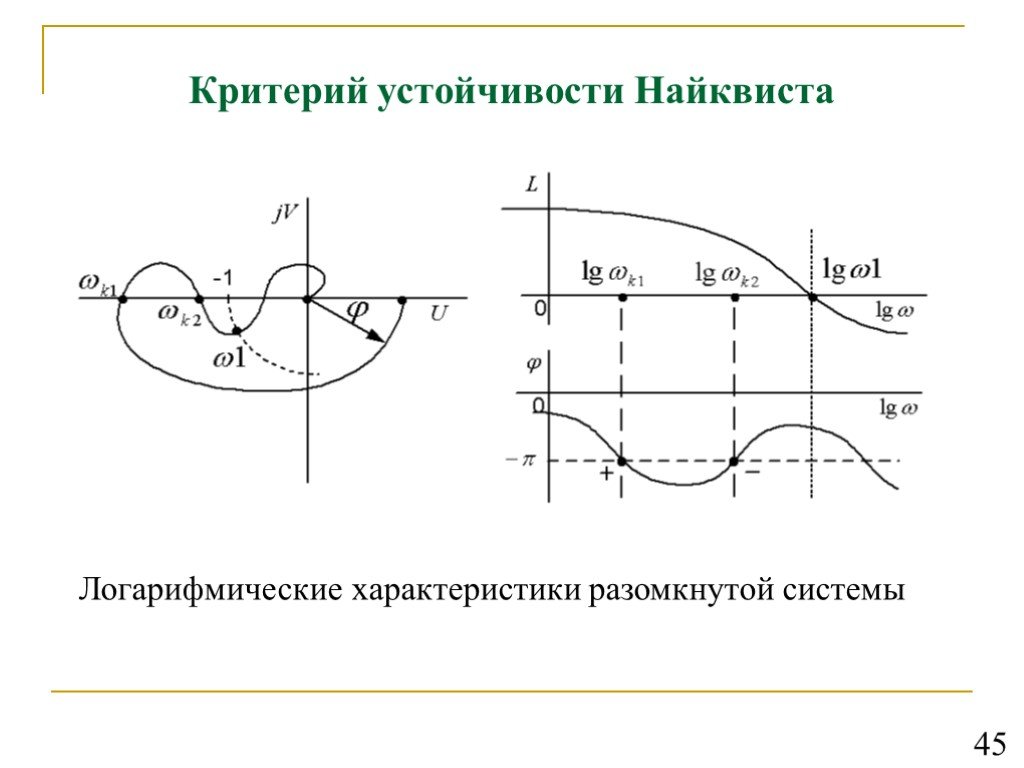 Слайд 46
Слайд 46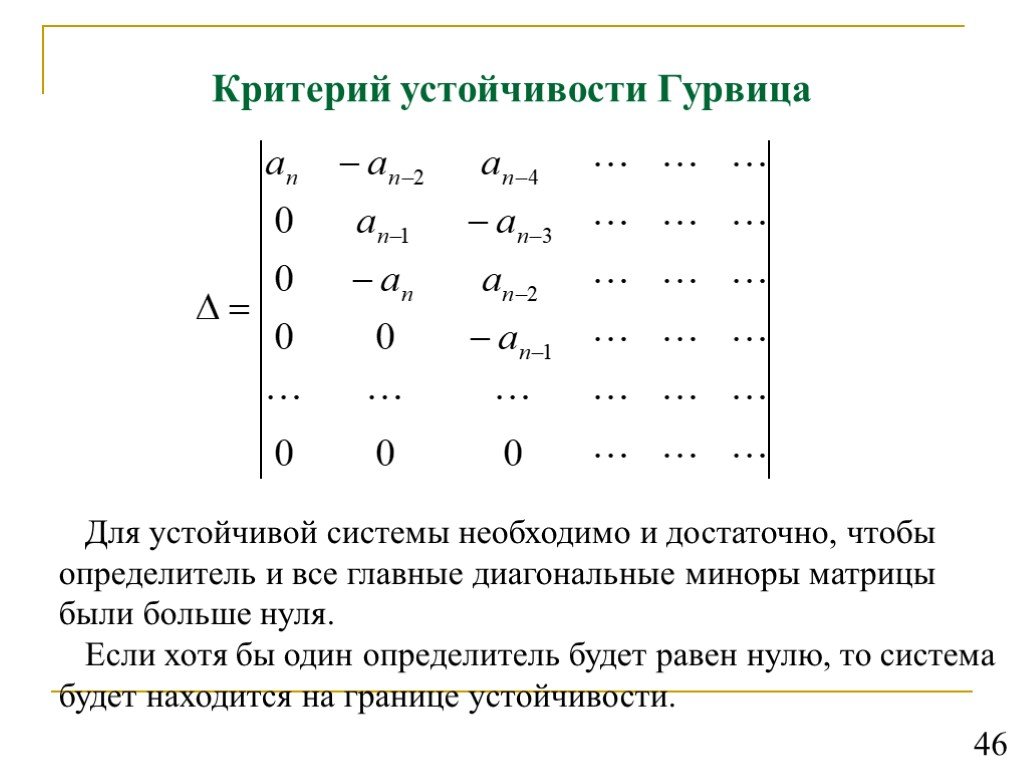 Слайд 47
Слайд 47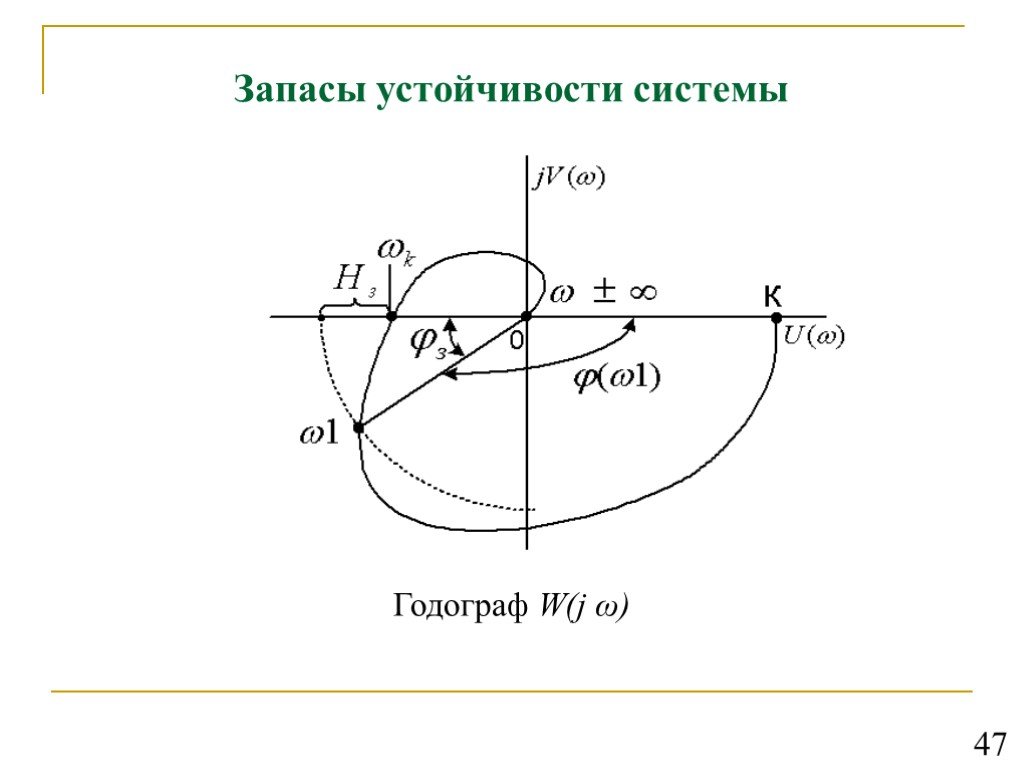 Слайд 48
Слайд 48 Слайд 49
Слайд 49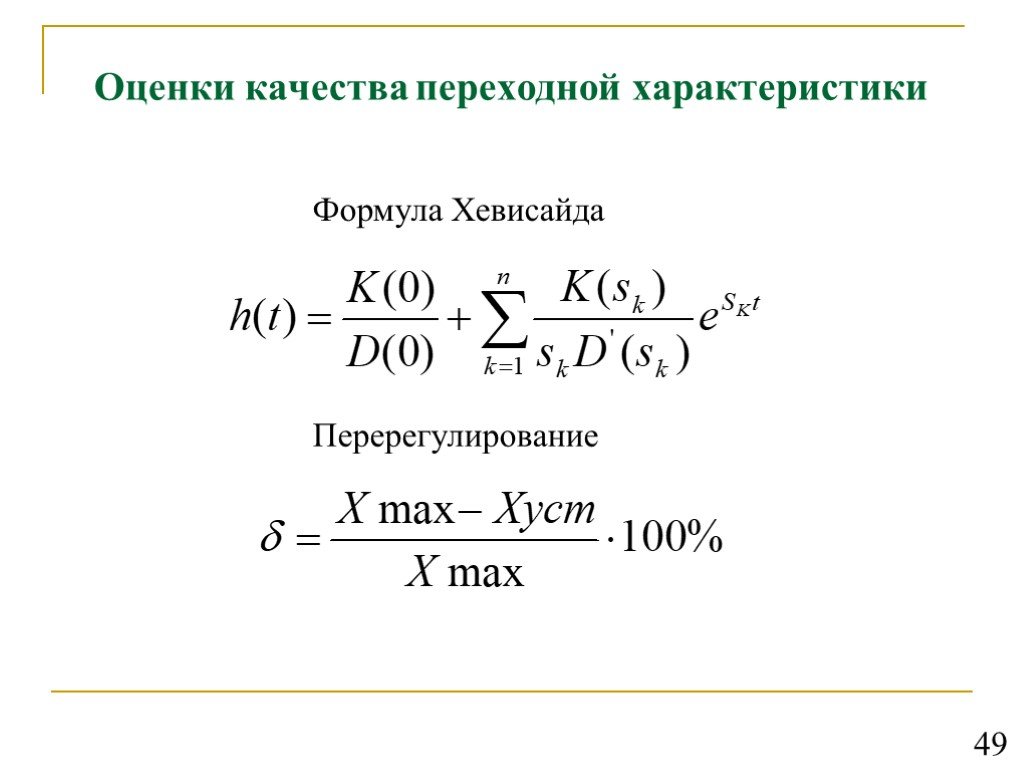 Слайд 50
Слайд 50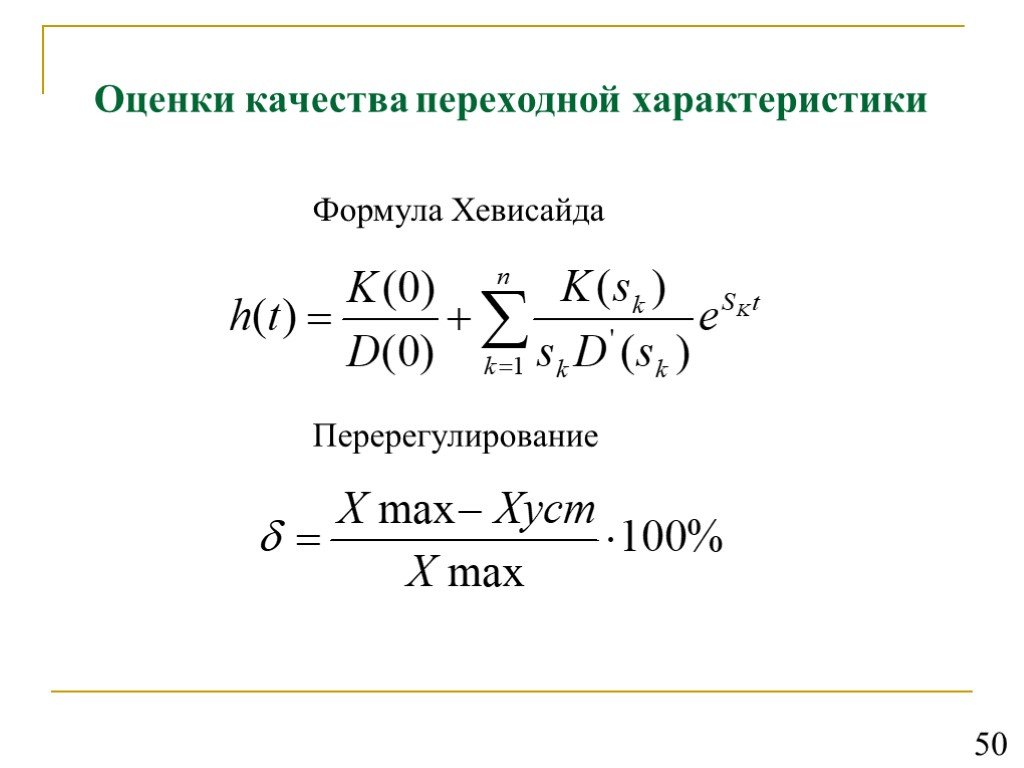 Слайд 51
Слайд 51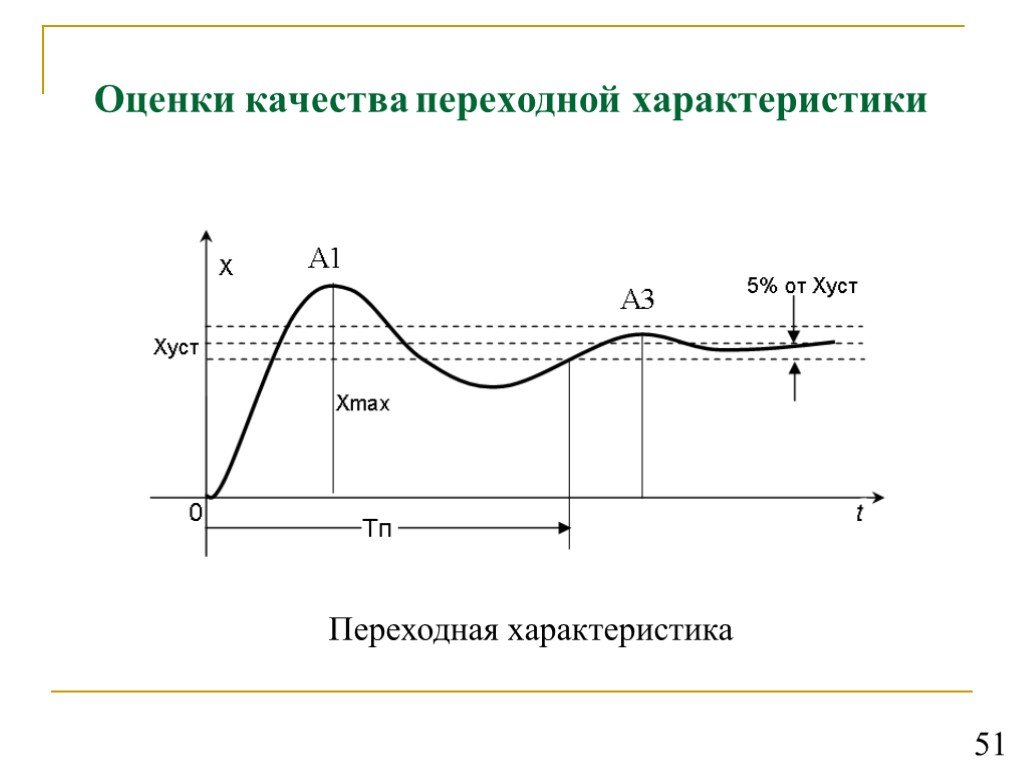 Слайд 52
Слайд 52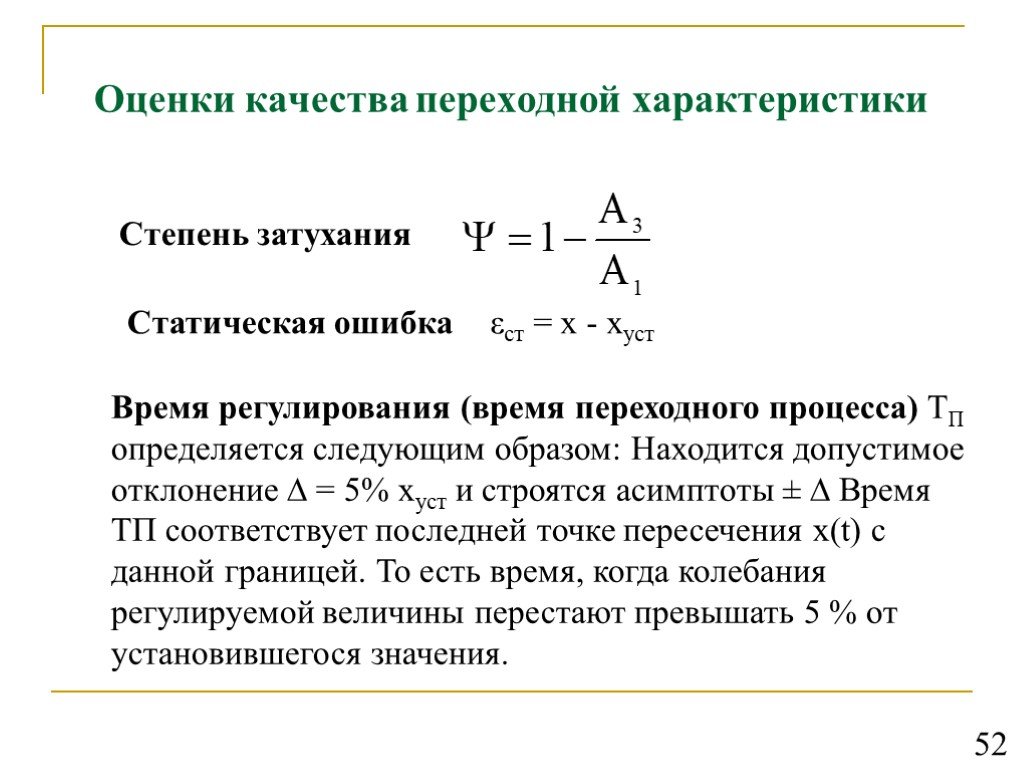 Слайд 53
Слайд 53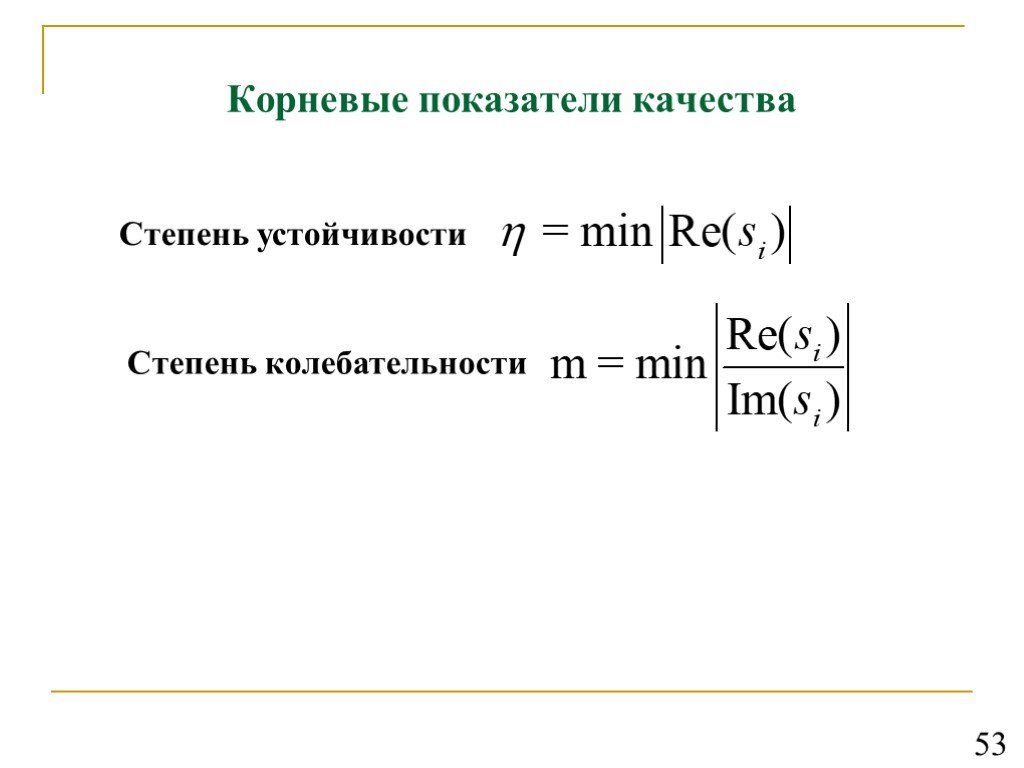 Слайд 54
Слайд 54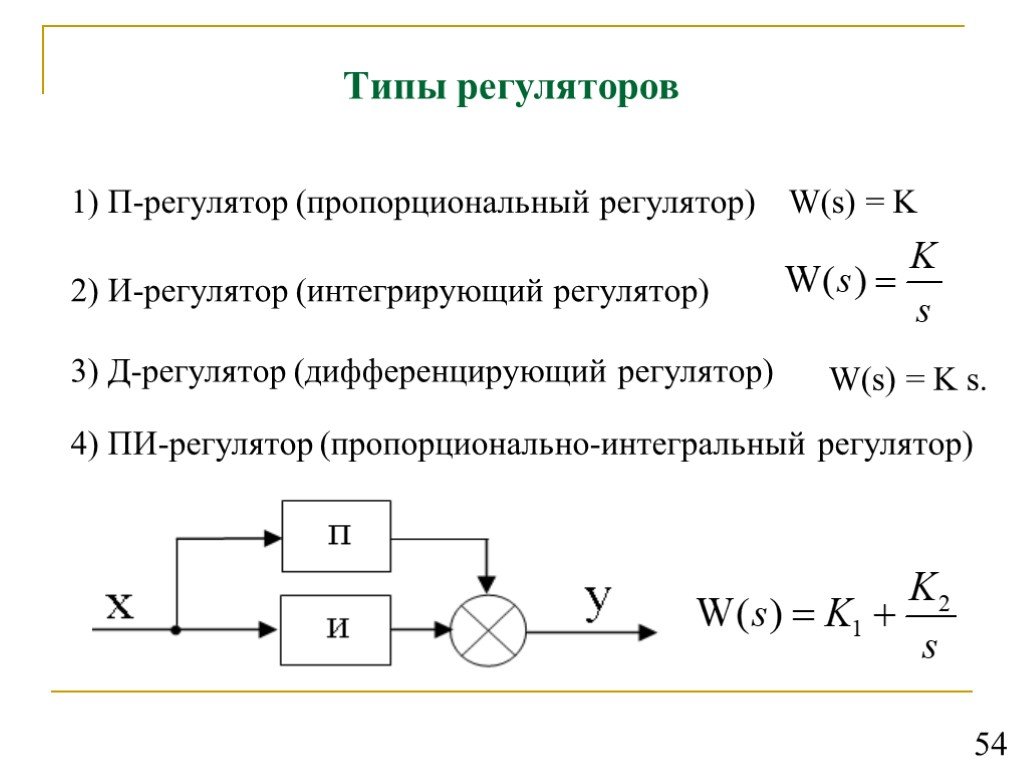 Слайд 55
Слайд 55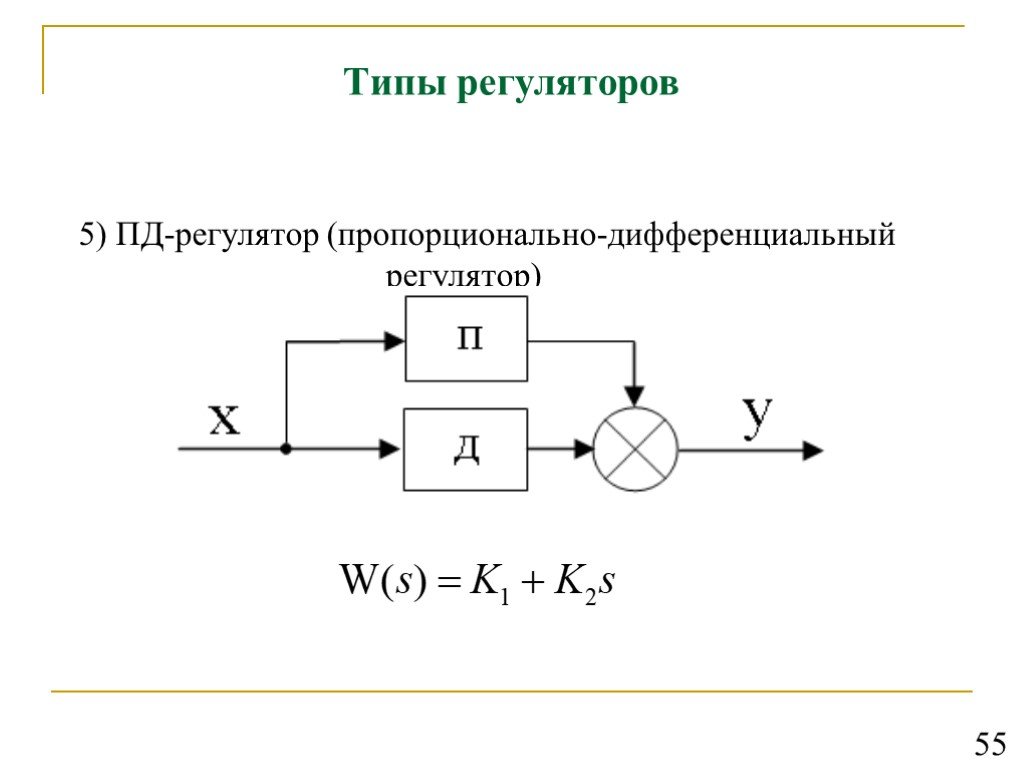 Слайд 56
Слайд 56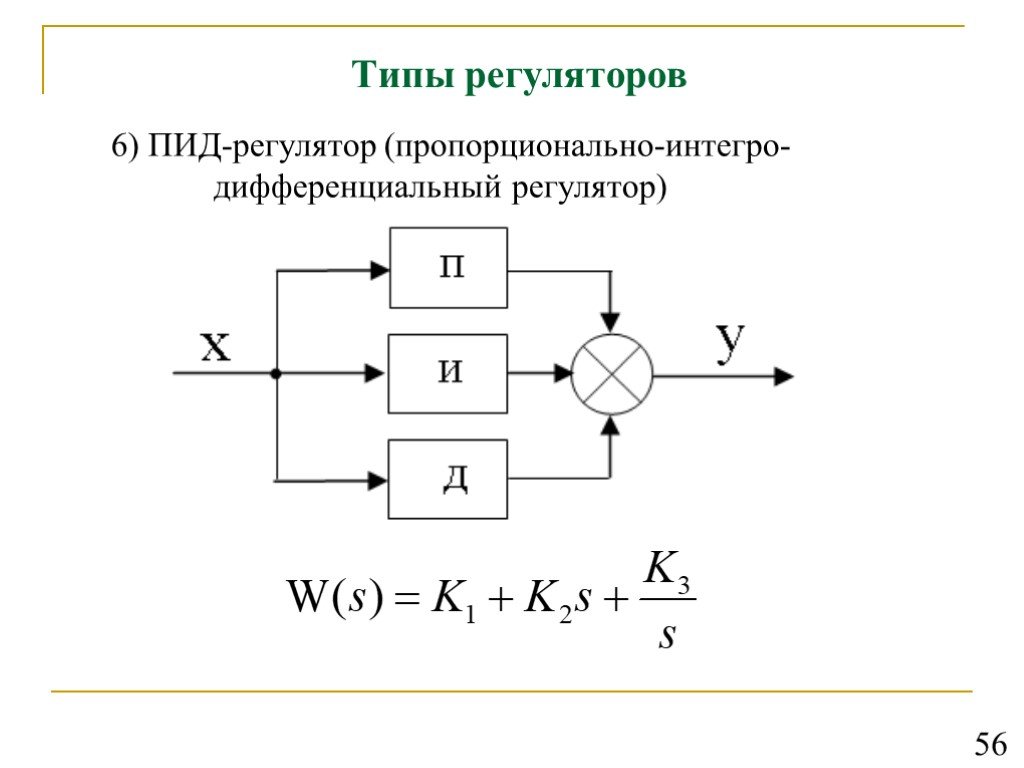 Слайд 57
Слайд 57
")



























