Слайд 1ТЕМА №2: Основы построения ЗРК
Занятие №1: Назначение, состав и тактико-технические характеристики ЗРС.
МГТУ им. Н.Э Баумана. Военный институт Кафедра №1 Военно-воздушных сил
Тема №2: Основы построения ЗРК
Автор: ВрИО начальника цикла ЗРВ ВВС, старший преподаватель подполковник Фр олов А.Е.
Слайд 2Занятие №6 Взаимодействие элементов ЗРС СД-ДД при её функционировании
Слайд 3Учебные вопросы: 1. Обеспечение целеуказанием с КП системы 2. Поиск, обнаружение и захват цели на сопровождение 3.Определение параметров ВЦ и ее сопровождение 4. Подготовка к уничтожению и уничтожение ВЦ
5. Оценка результатов стрельбы 6. Автономная работа ЗРК по ВЦ
Слайд 4Вопрос №1 Обеспечение целеуказания с КП системы

Слайд 5На КП полка автоматически производится обнаружение, завязка трасс и селекция целей с присвоением признаков: баллистическим целям - Б; аэродинамическим - А; маловысотным - Н. Данные функции выполняет РЛК. РЛК предназначен для обнаружения, автоматической завязки и сопровождения трасс, определения госпринадлежности целей и выдачи на ПБУ системы трассовой и другой радиолокационной информации. РЛК решает следующие основные задачи: - обнаружение воздушных целей и автоматическую завязку трасс воздушных целей в условиях, как без помех, так и при действии активных и пассивных помех; - сопровождение трасс воздушных целей и выдачу трассовой информации на ПБУ; - определение наличия и места расположения в зоне обзора интенсивных пассивных помех и выдачу этой информации на ПБУ; - определение пеленгационных направлений на постановщики активных помех и автоматическую завязку трасс пеленгов постановщиков помех; - сопровождение трасс пеленгов постановщиков помех и выдачу трассовой информации о постановщиках помех на ПБУ; - автоматическое определение принадлежности целей по принципу "свой-чужой" и выдачу этой информации в составе трассовой информации о воздушных целях на ПБУ.
1. Обеспечение целеуказания с КП системы.
 возбуждением. РЛК реализует обзор по азимуту β=360˚, по углу места ε от 0˚ до 55˚. Электронный сектор сканирования β=±45˚ от нормали ФАР")
Слайд 61 .Обеспечение целеуказания с КП системы.
Рис.1.1. Принцип обзора РЛК.
РЛК имеет в своём составе двухстороннюю ФАР проходного типа с пространственным (оптическим) возбуждением. РЛК реализует обзор по азимуту β=360˚, по углу места ε от 0˚ до 55˚. Электронный сектор сканирования β=±45˚ от нормали ФАР (рис 1.1).
Ширина диаграммы направленности 2Θ0,5p по β – 1,3˚, по ε – 1,8˚ (рис. 1.2).
Рис.1.2. Размеры ДН РЛК.
Слайд 7Для обнаружения аэродинамических целей, тактических баллистических ракет в РЛК реализуется режим регулярного обзора (РО). Зона РО по β просматривается за 12 сек (Тобз=12с), вертикально-строчным методом от 0,5˚ до 14˚ по углу места и 360˚ по азимуту (рис 1.1).
При обнаружении цели определяются её координаты в сферической СК азимут - βц, угол места - εц и наклонная дальность - Дц. Данная информация поступает в цифровую вычислительную машину (ЦВМ) РЛК, где рассчитывается строб захвата 4 х 3 луча ФАР по β и ε (рис. 1.3).
Рис.1.3. Строб захвата.

Слайд 8При повороте ФАР на угол β = βн + 180˚ регулярный обзор прерывается, луч перебрасывается на обратную сторону и осуществляется просмотр строба захвата, аналогичным режиму РО, вертикально-строчным способом. При обнаружении цели в стробе захвата происходит повторное определение координат цели (βц, εц , Дц), которые поступают на ЦВМ (Н8), после чего луч возвращается на прямую сторону и продолжается реализация РО без пропусков. При повороте ФАР на угол β = βн + 360˚, происходит очередное определение координат цели (βц, εц , Дц), которые поступают на ЦВМ РЛК. ЦВМ реализует алгоритм «3 из 4 при обязательном 2-ом».
 β = βн + 360")
Слайд 9Сущность алгоритма заключается в следующем: - обнаружение и определение координат цели в режиме РО; - обнаружение и определение координат цели в стробе захвата 4 × 3 при положении луча по азимуту β = βн + 180˚; обнаружение и определение координат цели в режиме РО (следующий цикл обзора) β = βн + 360˚,и.т.д. При выполнении условий алгоритма, цели присваивается номер. На основе приращения дальности рассчитывается её скорость, как первая производная от дальности, т.к при первом обнаружении цели информации для завязки трассы недостаточно (нет информации о скорости).
Цель берется на сопровождение ЦВМ РЛК и рассчитывается строб сопровождения 3 × 2 луча (рис 1.4), последовательность отработки которого аналогична отработке строба захвата.
Рис.1.4. Строб сопровождения.
 и целеуказания (ЦУ) решает следующие задачи: отбор целей для целераспределения;")
Слайд 10Информация о номерах и трассах сопровождаемых целей подается в ЦВК ПБУ. Съем данных в РЛК автоматизирован, что обеспечивает пропускную способность до 200 целей за обзор. КП ЗРС с помощью алгоритмов целераспределения (ЦР) и целеуказания (ЦУ) решает следующие задачи: отбор целей для целераспределения; целераспределение; целеуказание; доворот сектора МРЛС и ряд других вспомогательных задач.
Автоматическое ЦУ зрдн по мере подлета целей к заданному рубежу осуществляется при выполнении следующих условий: - дивизион боеготов; - имеются свободные целевые каналы; - цели закреплены за данным дивизионом; - цели вышли на рубеж целеуказания.

Слайд 11С ПБУ поступает следующая координатная информация: прямоугольные координаты X, Y, Z и их производные X, Y, Z, рассчитанные относительно точки стояния антенного поста МРЛС на момент выдачи ЦУ. Поступающая информация ЦУ пересчитывается в относительную биконическую систему координат, связанную с антенным полотном МРЛС. Относительные координаты целеуказания используются в качестве координат центра сектора допоиска МРЛС, благодаря чему обеспечивается минимальное работное время зрдн. Антенный пост МРЛС разворачивается по данным ЦУ с КПС, производится излучение зондирующих сигналов в пространство, в точку с данными ЦУ. При обнаружении цели МРЛС, данные передаются в ЦВК ПБУ, где происходит их сопоставление с данными РЛК - идентификация. В случая совпадения, ЦВК ПБУ начинает сопровождать цель по данным МРЛС.
Слайд 12D, V, β, ε X, Y, Z D, V, φн, φв
Слайд 13Вопрос №2 Поиск, обнаружение и захват цели зрдн
Слайд 14Способ обзора пространства в режиме ДОПОИСК зависит от источника, точности ЦУ и режима захвата. При ЦУ с ПБУ разворачиваются объемные сектора поиска по координатам в и н с перемещением луча по столбцам снизу вверх и слева на право. Во время работы целевого канала, в который было введено ЦУ, одно зондирование осуществляется в точку целеуказания (ОТСКОК). Информация обзора в районе точки целеуказания отображается на индикаторе Д-в результат ОТСКОКа - на индикаторе Д-V. Производится обнаружение цели.
2 .Поиск, обнаружение и захват цели зрдн. 2.1. Поиск цели по данным КПС.
. При этом на МРЛС поступает ЦУ в режиме ПЕЛЕНГ. В составе информации целеуказания поступают координаты двух точек: ближней (БТ) и дальней (ДТ). При обзоре пространства в режиме ПЕЛЕНГ луч первой стро")
Слайд 15Особым образом обрабатывается целеуказание по постановщику активных помех средствами управления (СУ). При этом на МРЛС поступает ЦУ в режиме ПЕЛЕНГ. В составе информации целеуказания поступают координаты двух точек: ближней (БТ) и дальней (ДТ). При обзоре пространства в режиме ПЕЛЕНГ луч первой строки выставляется в точку пространства ниже ближней точки на 54', следующие три луча устанавливаются по вертикали с шагом примерно 36'. Таким образом, по вертикали просматривается область примерно в 2гр.20'. Далее лучи перемещаются вдоль линии ПЕЛЕНГа с шагом примерно 20'. В зависимости от расположения линии ПЕЛЕНГа относительно ЗРС движение развертки может происходить слева на право или справа налево.
2. Поиск, обнаружение и захват цели зрдн. 2.2. Обзор пространства при ЦУ по линии пеленга.
Слайд 16Вопрос №3 Захват цели на сопровождение. Определение государственной принадлежности.
Слайд 17Под захватом цели понимается переход на автоматическое сопровождение по четырем координатам ( D, V, в, н). Захват на сопровождение целей осуществляется в следующей последовательности: - одиночные цели, в том числе постановщики помех; - группы целей, неразрешаемые по угловым координатам и скорости. Захват целей на сопровождение МРЛС производится в автоматическом или ручном режимах. Независимо от способа при захвате целей в МРЛС выполняются следующие операции: обнаружение цели в секторе допоиска; наведение угловых следящих систем на цель; поиск и наведение следящей системы по скорости; наведение следящей системы по дальности и захват цели на автоматическое сопровождение по всем координатам; выбор однозначной дальности до цели.
3. Захват цели на сопровождение. Определение государственной принадлежности. 3.1. Захват цели на сопровождение.
 и автоматическое сопровождение с однозначной дальностью (р")
Слайд 18Сопровождение целей МРЛС может осуществляться автоматическим, ручным, а также комбинированным способами. В МРЛС предусмотрены два режима, автоматического сопровождения цели - автоматическое сопровождение с неоднозначной дальностью (режим АС) и автоматическое сопровождение с однозначной дальностью (режим АС-СЦ). Режим автоматического сопровождения используется на этапе устранения неоднозначности по дальности. Характерным для этого режима является периодическое кратковременное попадание цели в "слепые" зоны по дальности. Для обеспечения устойчивого сопровождения цели, следящие системы на время прохождения целью "слепой" зоны переводятся в режим "памяти". Ручное сопровождение (РС) цели применяется при ручном захвате до перехода на автоматическое сопровождение цели Комбинированное сопровождение применяется для сопровождения неразрешаемой по угловым координатам группы постановщиков активных помех, а также группы из трех и более целей без помех, не разрешаемых по угловым, координатам и скорости. В режиме комбинированного сопровождения (АС) реализуется автоматическое сопровождение по угловым координатам и ручное по дальности и скорости одной цели из состава группы с возможностью назначения для обстрела группы повышенного наряда ракет путем подключения ведомых целевых каналов.
3. Захват цели на сопровождение. Определение государственной принадлежности. 3.2. Сопровождение целей

Слайд 19В процессе стрельбы ведётся непрерывный контроль воздушной и помеховой обстановки и устойчивости сопровождения цели. Контроль сопровождения цели осуществляется автоматически и визуально боевым расчетом КП зрдн. Автоматический контроль является основным и обеспечивается с помощью автомата перезахвата и алгоритма помехозащиты. Дополнительно контроль сопровождения цели каждым каналом можно осуществлять по признакам сопровождения, высвечивающимся на табло АС пульта управления. На индикаторе D-V РМОН (рабочего места оператора наведения) отображается обстановка в районе цели в пределах одного луча МРЛС и в поисковом объеме по дальности и скорости. При необнаружении цели в луче МРЛС в течение 7…10с целевой канал освобождается. Срыв автосопровождения цели может произойти при выходе цели из луча МРЛС. При срыве автосопровождения исчезает отметка цели на экране индикатора.
3. Захват цели на сопровождение. Определение государственной принадлежности. 3.3. Контроль сопровождения цели.

Слайд 20Опознавание целей в ЗРК осуществляется с помощью радиолокационного запросчика системы "Пароль", который с аппаратурой сопряжения обеспечивает автоматизированное опознавание сопровождаемых целей МРЛС. Контроль результата определения государственной принадлежности цели осуществляется по подсвету на табло КОНТР. ОПОЗН. Символов «Ч» или «С». Государственная принадлежность цели определяется автоматически после захвата ее на сопровождение при включении режима СЦ. Вручную опознавание цели осуществляется непосредственно перед пуском ракеты. При необходимости уточнения государственной принадлежности в процессе сопровождения цели это может быть сделано вручную в любой момент времени. По целям с признаком "Баллистическая" или "Наземная", а также при отсутствии на МРЛС однозначной дальности до цели опознавание не проводится.
3. Захват цели на сопровождение. Определение государственной принадлежности. 3.4. Определение государственной принадлежности целей.

Слайд 21Вопрос №4 Подготовка к уничтожению и уничтожение воздушной цели

Слайд 22Назначение ракет целевым каналам производится автоматически или вручную после захвата цели на сопровождение МРЛС, определения ее характеристик и оценки условий стрельбы. Исходя из условий стрельбы, на каждый целевой канал назначаются: - две ракеты - по постановщикам активных помех; - две ракеты - при сопровождении цели из состава группы целей в луче МРЛС, разрешаемых по дальности; - две ракеты - по маловысотным целям. При назначении ракет целевым каналам используется следующая информация: Признак «Помеха МРЛС», который, вырабатывается автоматически после включения автосопровождения при наличии помехи; Признак «Группа целей» вырабатываемый автоматически при условии сопровождения каждой цели отдельным, целевым каналом при угловом расстоянии между целями менее 1° и разности дальностей до целей более 100м; признак «Маловысотная цель», вырабатывается автоматически при высоте полёта цели равной или менее 500м (индицируется на экране индикатора пуска).
4. Подготовка к уничтожению и уничтожение воздушной цели. 4.1. Назначение ракет целевым каналам.

Слайд 23Под исходными данными для стрельбы понимается совокупность сведений о воздушной обстановке и состоянии зрдн, необходимых для принятия решения на обстрел цели. Командир дивизиона совместно с лицами боевого расчета оценивает следующие исходные данные для стрельбы: - количество целей, сопровождаемых МРЛС; - степень важности, целей; - характеристики целей; - положение текущих точек встречи относительно границ зоны поражения, признак высотности, время оставшееся до выхода каждой цели из зоны пуска; - количество ракет, готовых к пуску (по типам), и общее число ракет на пусковых установках; - результаты опознавания цели - по высвечиванию символов "Ч" или "С"; - команды, полученные с КП полка. На основе оценки исходных данных для стрельбы принимается решение на обстрел целей, которое включает: - определение очередности обстрела цели и выбор рубежей обстрела; - назначение расхода и уточнение типа ракет, вида стрельбы и интервала пуска ракет по каждой цели.
4. Подготовка к уничтожению и уничтожение воздушной цели. 4.2. Оценка исходных данных для стрельбы и принятия решения на обстрел цели.

Слайд 244.3.1. Пуск ракет. Пуск ракет проводится при сопровождении цели в автоматическом АС-СЦ или комбинированном АС - СЦ режимах, при наличии признака "Чужой", готовности ракет к пуску по данному целевому каналу, нахождении точки встречи ракеты с целью в пределах границ зоны поражения и отсутствии признака «ЗАПРЕТ ПУСКА». Пуск первой ракеты проводится вручную при достижении расчётной точки встречи назначенного рубежа (дальней границы расчетной или гарантированной зоны поражения). Пуск второй ракеты в очереди может производиться автоматически или вручную. При отсутствии старта первой ракеты в очереди автоматический пуск второй ракеты невозможен, поэтому пуск второй ракеты должен в этом случае проводиться вручную.
4. Подготовка к уничтожению и уничтожение воздушной цели. 4.3. Обстрел цели.
Обстрел цели включает:
пуск ракет
контроль захвата и наведения ракет на цель

Слайд 25Матрица захвата
4.3.2. Контроль захвата, и наведения ракет на цель. После пуска ракет осуществляется контроль захвата их на сопровождение МРЛС и наведения на цель. Захват ракет на сопровождение производится поочередно по специальной программе, которая обеспечивает поиск ракет после старта, измерение ее координат для передачи на АС, а также необходимые переключения режимов работы устройств МРЛС на начальном этапе АС.
Этапы полета ЗУР 48Н6
Слайд 26Вопрос 5 Оценка результатов стрельбы
Слайд 27Оценка результатов обстрела цели. Командир дивизиона совместно с лицами боевого расчета КП зрдн оценивает результаты обстрела цели по совокупности признаков, наблюдаемых на экранах индикаторов МРЛС: наличие признака "Промах в норме"; совмещение стробов сопровождения ракет с отметкой обстреливаемой цели; дробление и исчезновение отметки цели; резкое изменение радиальной скорости цели; срыв автосопровождения цели (в отдельных случаях); резкое изменение границ зоны поражения обстреливаемой цели; пропадание активных помех или изменение их уровня при стрельбе по постановщику активных помех.
28
5. Оценка результатов стрельбы.

Слайд 2829
При оценке результатов обстрела цели необходимо учитывать: 1. Применение обстреливаемой целью противоракетного маневра за насколько секунд до встречи, наблюдаемого на экранах индикаторов, МРЛС как резкое изменение границ зоны поражения и радиальной скорости цели, может быть ошибочно принято как поражение этой цели. Такому заключению будут способствовать: - близость моментов начала маневра цели и встречи ракеты с целью; практическое совмещение на экране индикатора пуска отметки цели отметкой фиксированной точки встречи на момент пуска ракеты. 2. Пропадание активных помех или изменение их уровня может наблюдаться и при выключении обстреливаемой целью активных помех или изменении ракурса цели при ее маневре.
Слайд 29Вопрос 6 Автономная работа ЗРК по воздушной цели
Слайд 30А) В режиме всевысотного обнаружения: -по азимуту ………………………………………..360 ; -по углу места (обнаружение) …….…...…от 0 до 20 ; -по углу места (сопровождение) ……........от 0 до 55 ; (можно устанавливать нижнюю границу обзора -3 ) -по доплеровской скорости ….. от + 30 до + 1200 м/с. темп обновления информации: -в нижней зоне от 0 - 1,5 ……………....……..6 сек; -в верхней зоне от 1,5 - 20 ………….…….….12 сек.
Разведка воздушного противника в дивизионе ведётся ВВО в следующих режимах обзора:
31
6 .Автономная работа ЗРК по воздушной цели.
РО-1 - режим всевысотного обнаружения
Слайд 31РО-2 - режим низковысотного обнаружения
Б) В режиме низковысотного обнаружения: -по азимуту …………………………………….……..360 ; -по углу места … 1,5 (с огибанием поверхности до -3 ); -по углу места (сопровождение) ……............от 0 до 55 ; -по доплеровской скорости ……… от + 30 до + 1200 м/с. -полный цикл обзора ……………….……....……..6 сек.
32
6. Автономная работа ЗРК по воздушной цели.
Слайд 32РО-4 - режим секторного обнаружения
А) В режиме секторного обнаружения: В секторе -по азимуту …………………………………..…….до 120 ; -по углу места (по БЦ) …….…………….….…от 0 до 55 ; -по доплеровской скорости (по БЦ).. от + 50 до + 2800 м/с. -время обзора сектора……………….……..….....…до 8 с; Вне сектора -по углу места ………………………..……..от - 3 до 1,5; -время обзора нижнего сектора …………..……...…..5,5 с.
34
Слайд 33При отсутствии ВВО поиск целей производится МРЛС в режиме автономного поиска в секторе 0,8˚×90˚ НП (рис 6.4), 3,20˚×90˚ (рис 6.5), 8˚×90˚ (рис 6.6), 16˚×90˚ (рис 6.7).
35

Слайд 3537
Положение сектора МРЛС по азимуту устанавливается в режиме автономного управления приводом, совмещением биссектриссы рабочего сектора МРЛС с азимутом целеуказания. Начальный угол места сектора поиска устанавливается в зависимости от дальности и высоты полета целей. Поиск целей осуществляется в течении 2…3 обзоров. При не обнаружении цели и отсутствии новых данных о цели, угол места сектора поиска увеличивается (для приближающейся цели) на 2…3°. На обзор секторов автономного поиска выделяется все свободное время МРЛС. Обнаружение целей в секторе автономного поиска осуществляется оператором по индикатору автономного поиска. Поворот антенного поста МРЛС производится при разрешении с КПС по команде командира дивизиона. При этом сектор МРЛС автоматически поворачивается до попадания отметки маловысотной цели в сектор электронного сканирования луча МРЛС. После захвата цели на сопровождение включается дистанционное управление приводом.

Слайд 36Захват целей на сопровождение МРЛС производится в автоматическом или ручном режимах. Независимо от способа при захвате целей в МРЛС выполняются следующие операции: - обнаружение целей в секторе поиска; - наведение угловых следящих систем на цель; - поиск и наведение следящей системы по скорости; - наведение следящей системы по дальности и захват цели на автоматическое сопровождение по всем координатам; - выбор однозначной дальности до цели. Для захвата отделяющихся целей в МРЛС, после перехода на автосопровождение хотя бы одной цели, постоянно выделяется один из свободных целевых каналов. Сопровождение целей МРЛС может осуществляться автоматическим, ручным, а также комбинированным способами. Поиск целей по целеуказанию от ВВО осуществляется в течении 7…10с (в условиях помех до 15с) Если за это время цель не обнаружена, целевой канал освобождается.
38
6 Автономная работа ЗРК по воздушной цели

Слайд 37Литература «Основные принципы построения ЗРС «Волхов М6» издательство ЭВЗРКУ 1989 год. «Справочник офицера ПВО»4 изд. 1997 год. Журнал «Воздушно-космическая оборона» №3 2008 год Официальный сайт НПО «АЛМАЗ-АНТЕЙ»
 Слайд 1
Слайд 1 Слайд 2
Слайд 2 Слайд 3
Слайд 3 Слайд 4
Слайд 4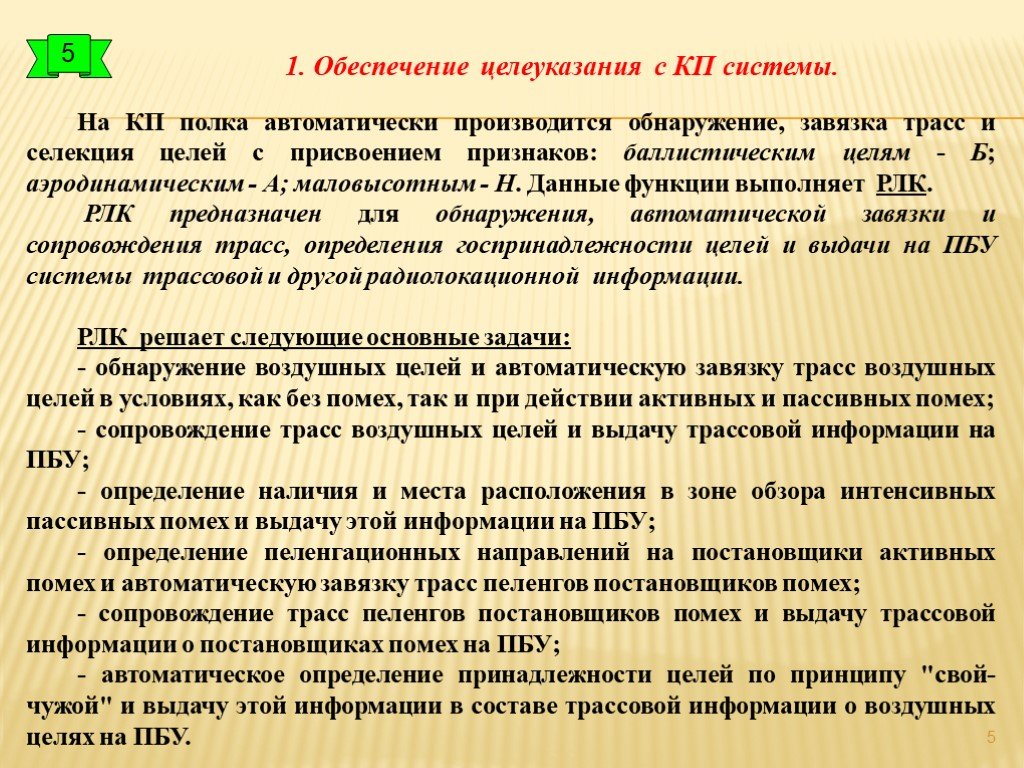 Слайд 5
Слайд 5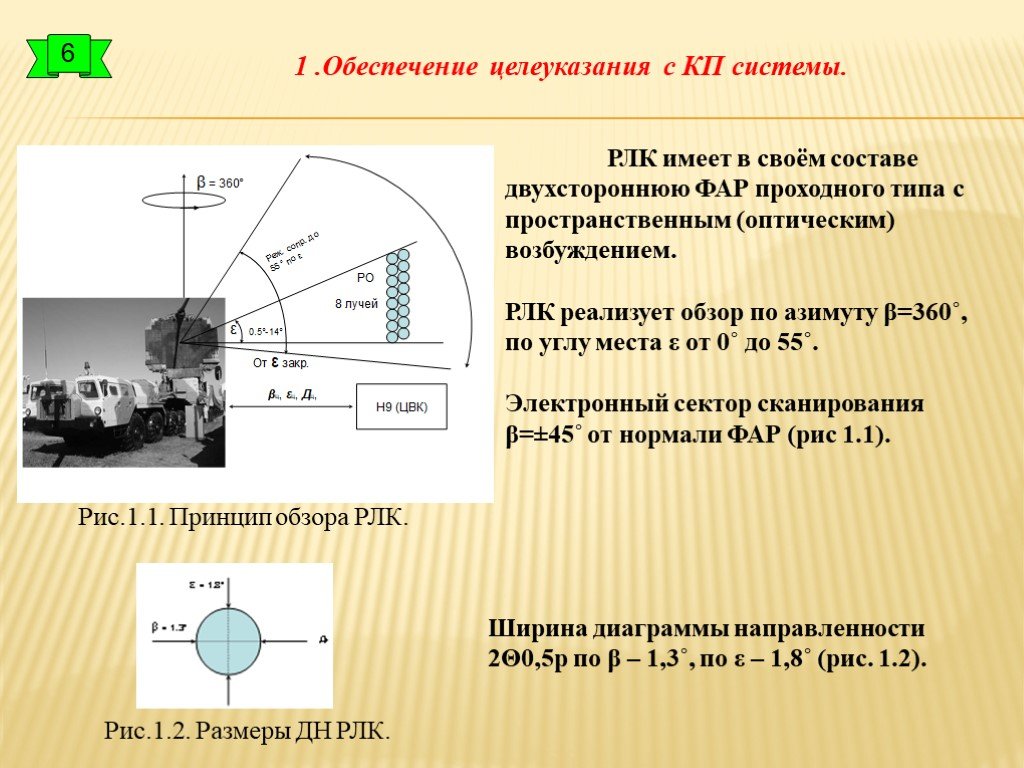 Слайд 6
Слайд 6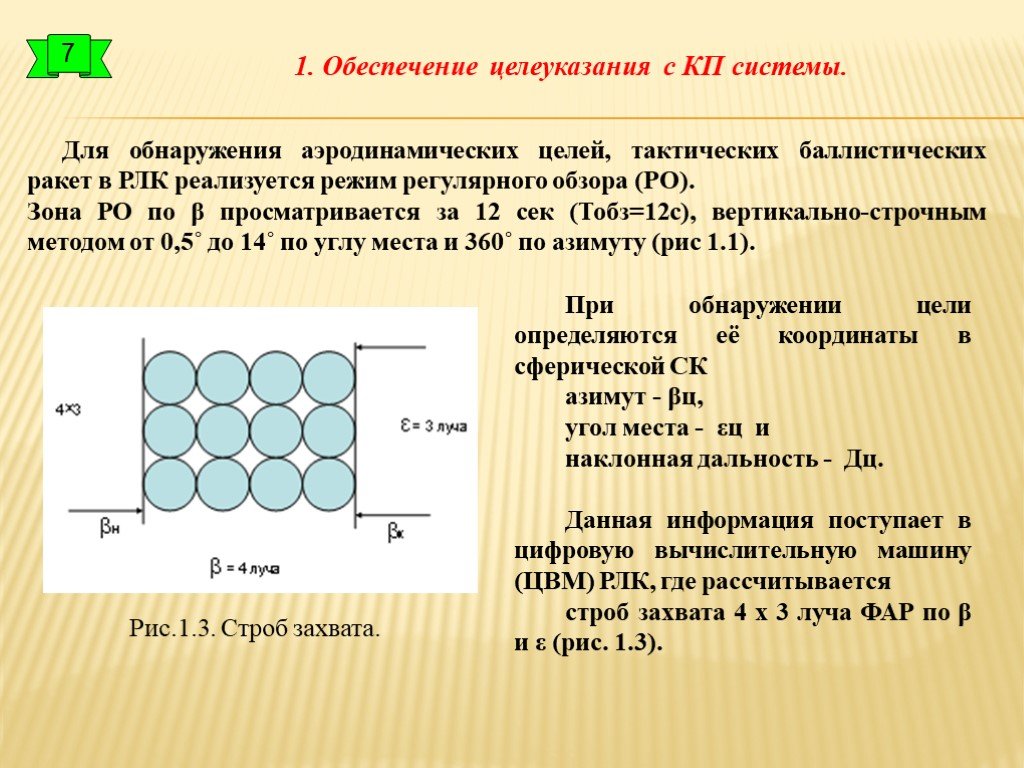 Слайд 7
Слайд 7 Слайд 8
Слайд 8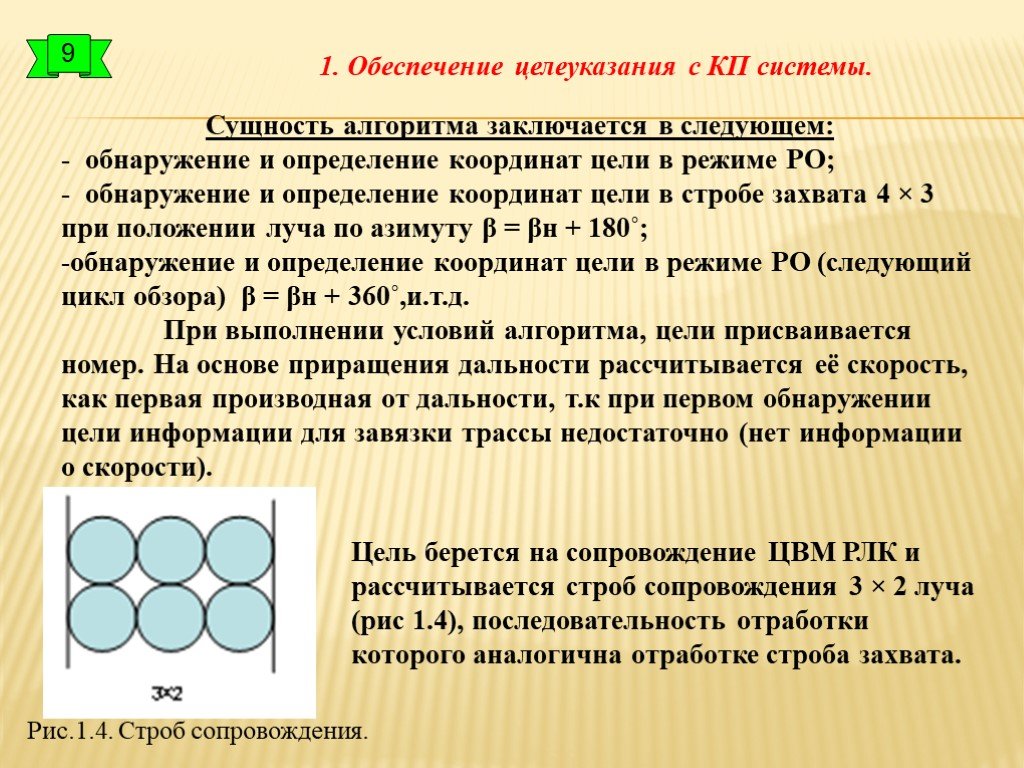 Слайд 9
Слайд 9 Слайд 10
Слайд 10 Слайд 11
Слайд 11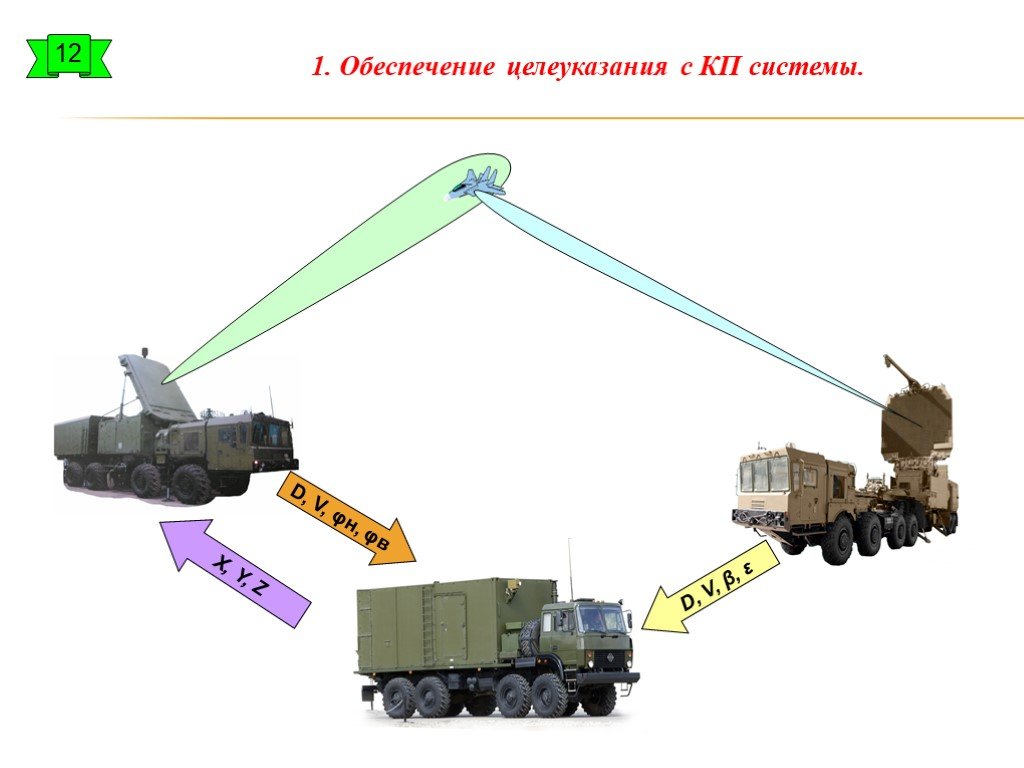 Слайд 12
Слайд 12 Слайд 13
Слайд 13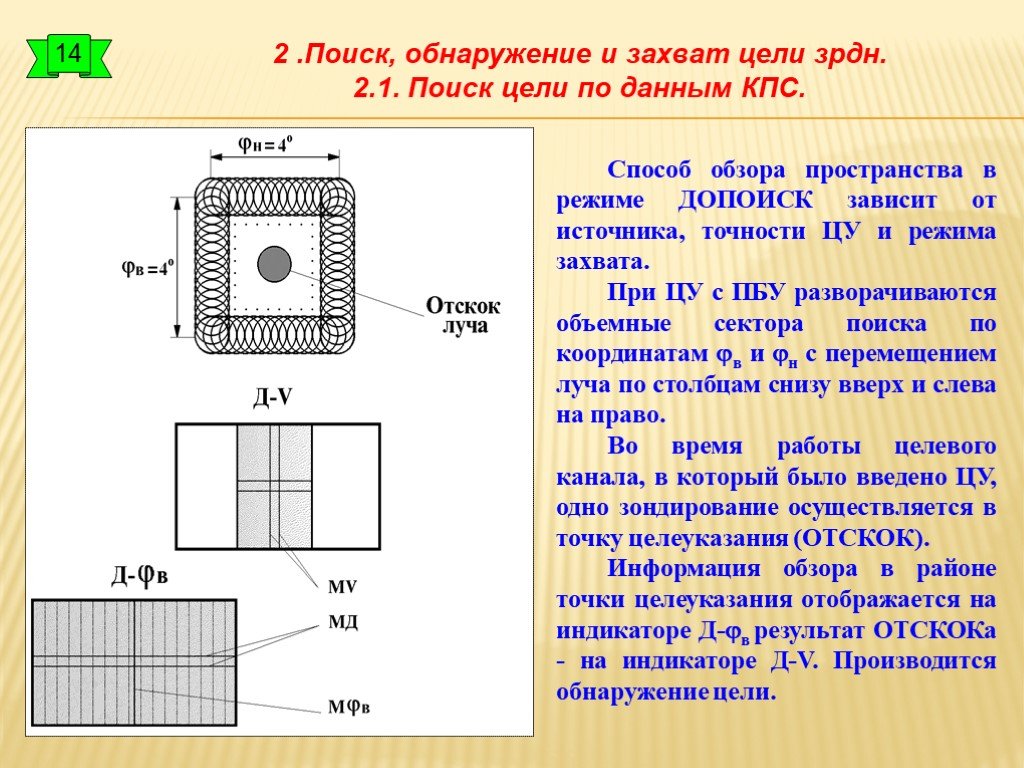 Слайд 14
Слайд 14 Слайд 15
Слайд 15 Слайд 16
Слайд 16 Слайд 17
Слайд 17 Слайд 18
Слайд 18 Слайд 19
Слайд 19 Слайд 20
Слайд 20 Слайд 21
Слайд 21 Слайд 22
Слайд 22 Слайд 23
Слайд 23 Слайд 24
Слайд 24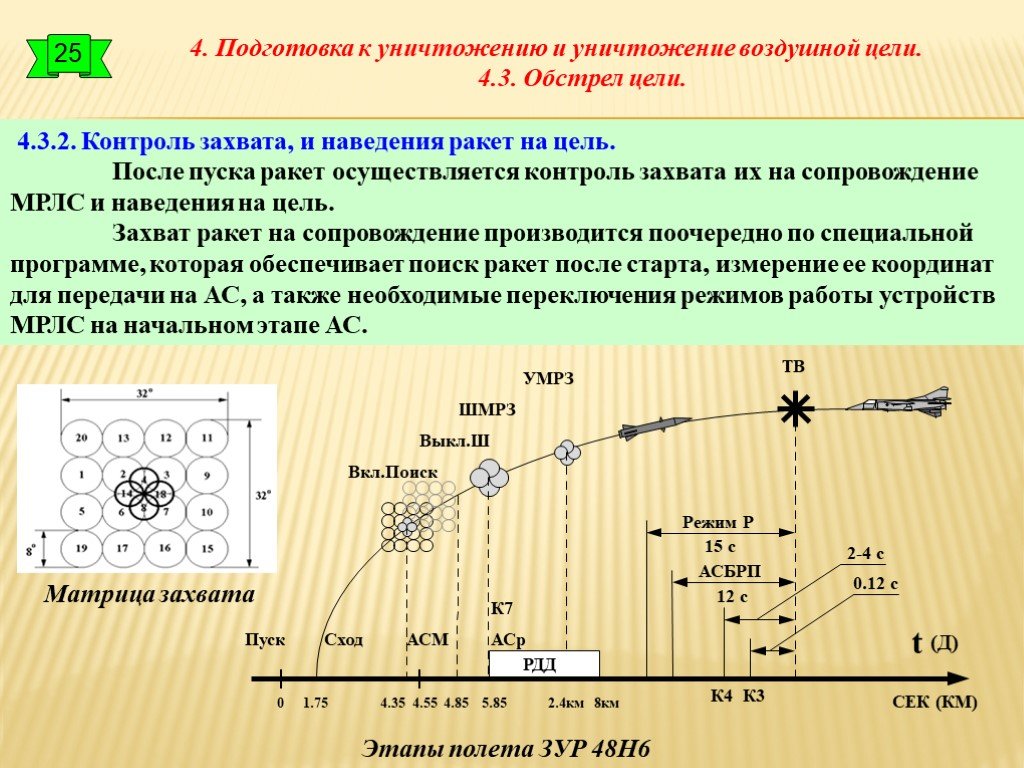 Слайд 25
Слайд 25 Слайд 26
Слайд 26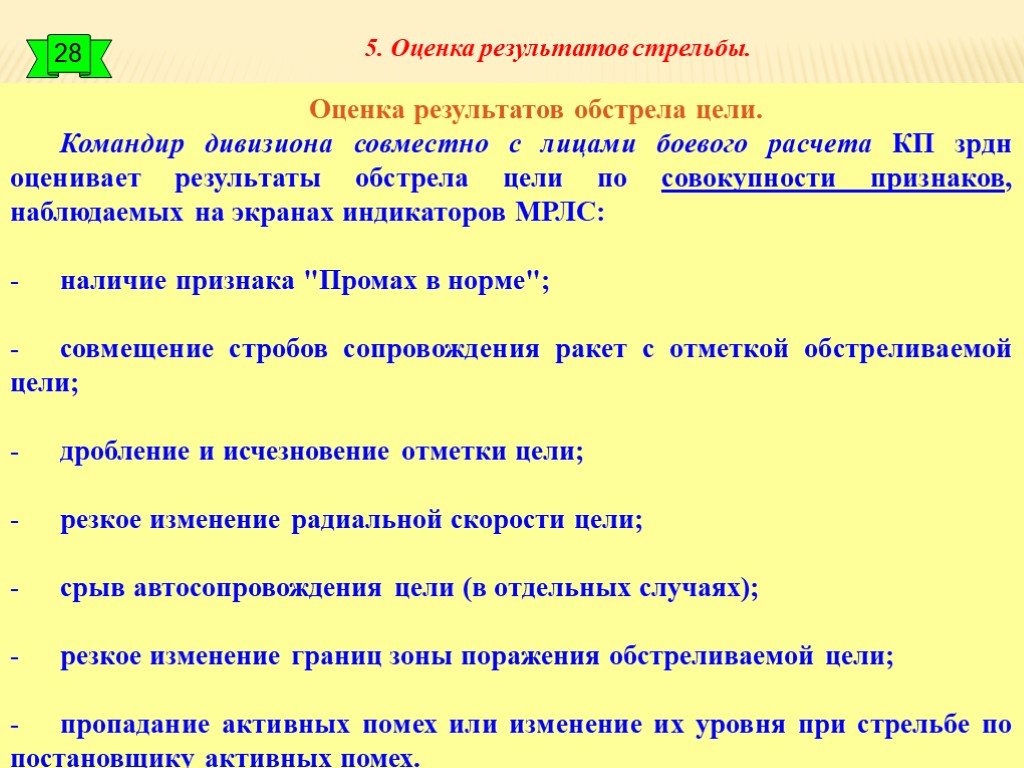 Слайд 27
Слайд 27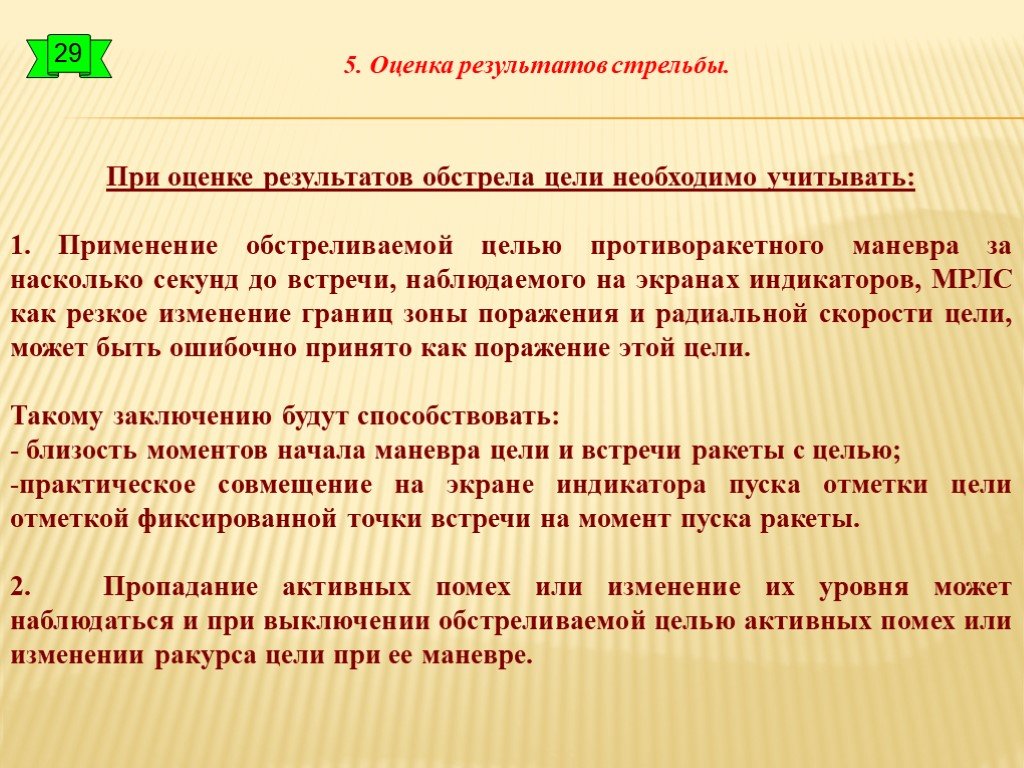 Слайд 28
Слайд 28 Слайд 29
Слайд 29 Слайд 30
Слайд 30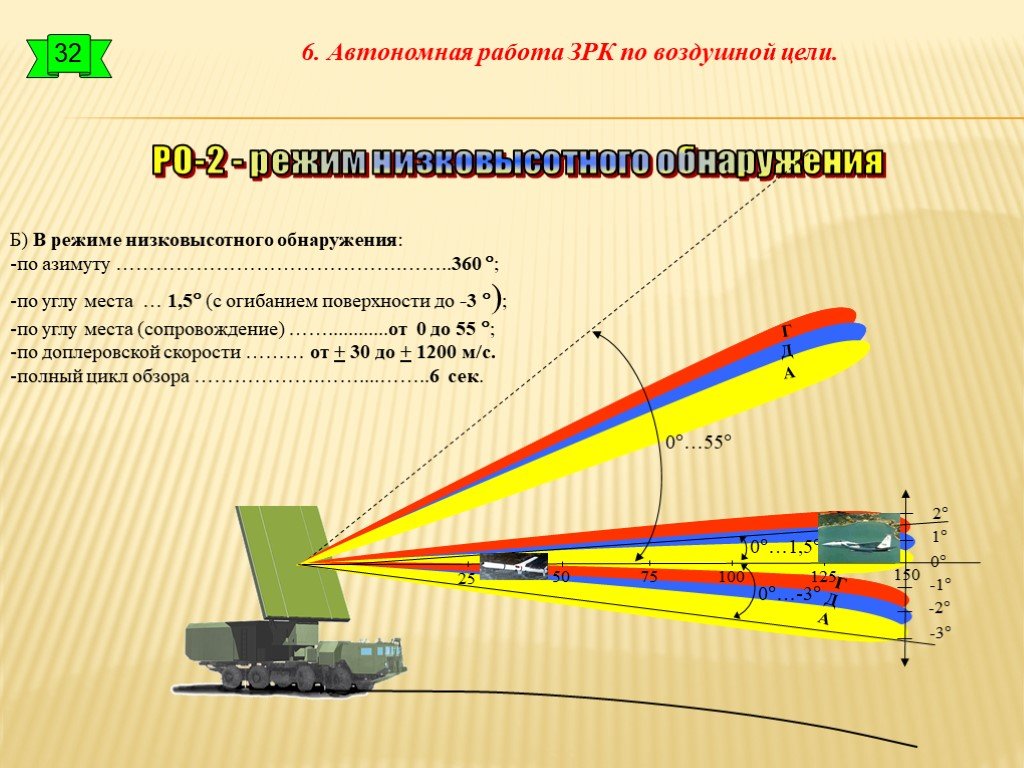 Слайд 31
Слайд 31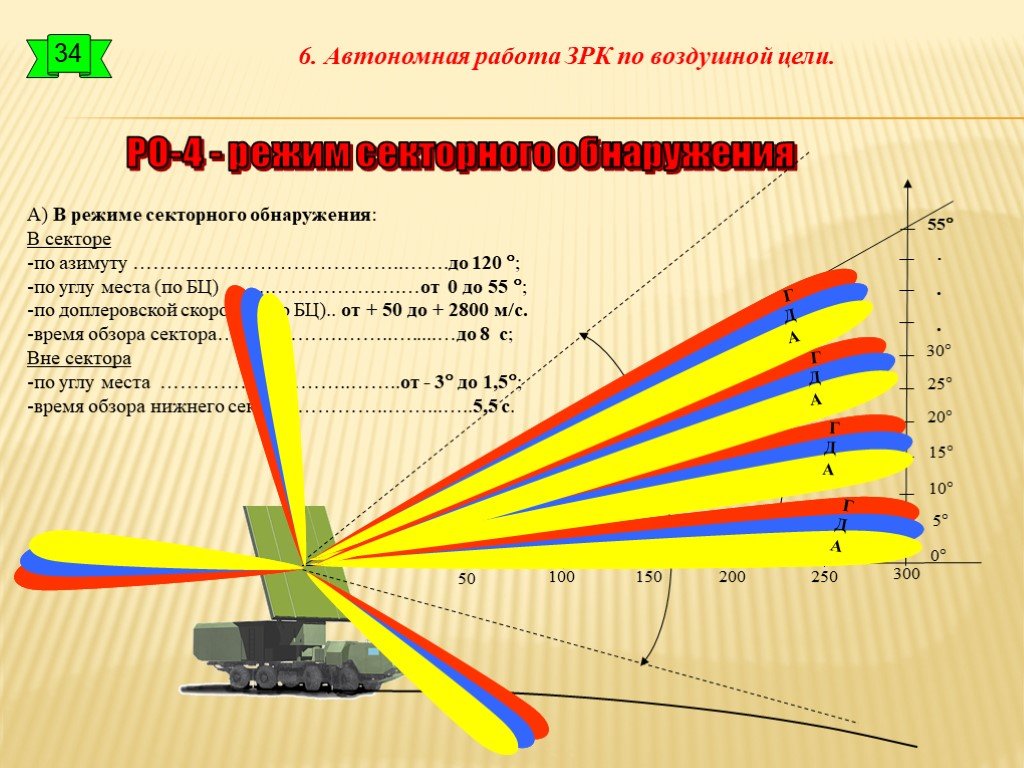 Слайд 32
Слайд 32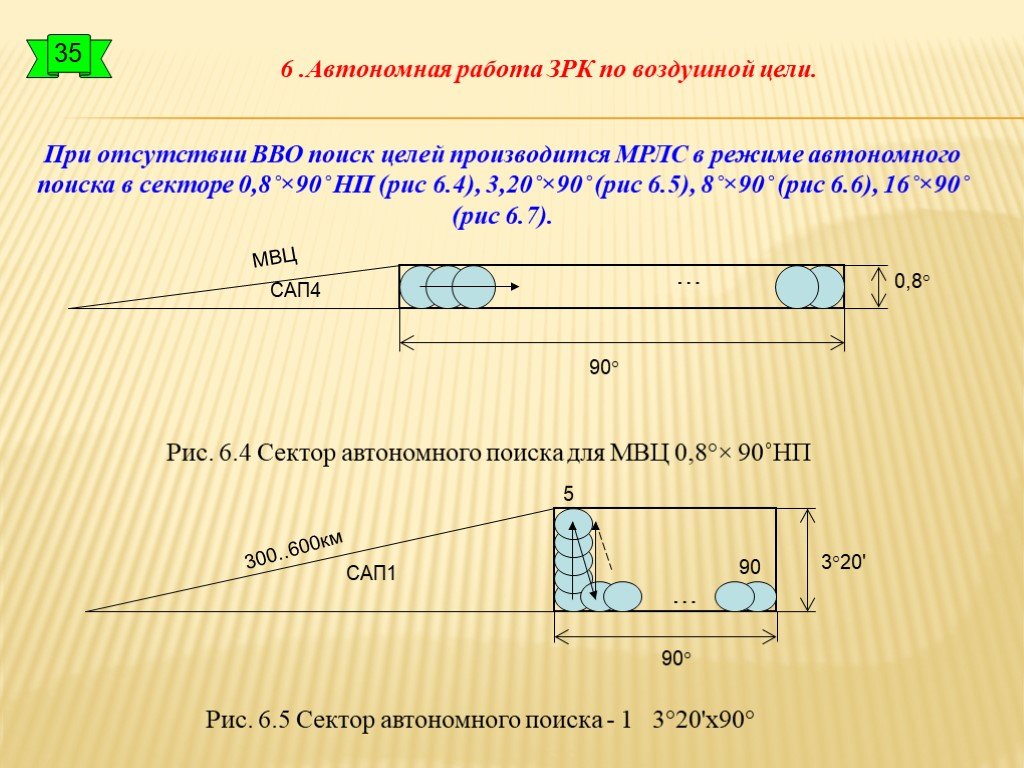 Слайд 33
Слайд 33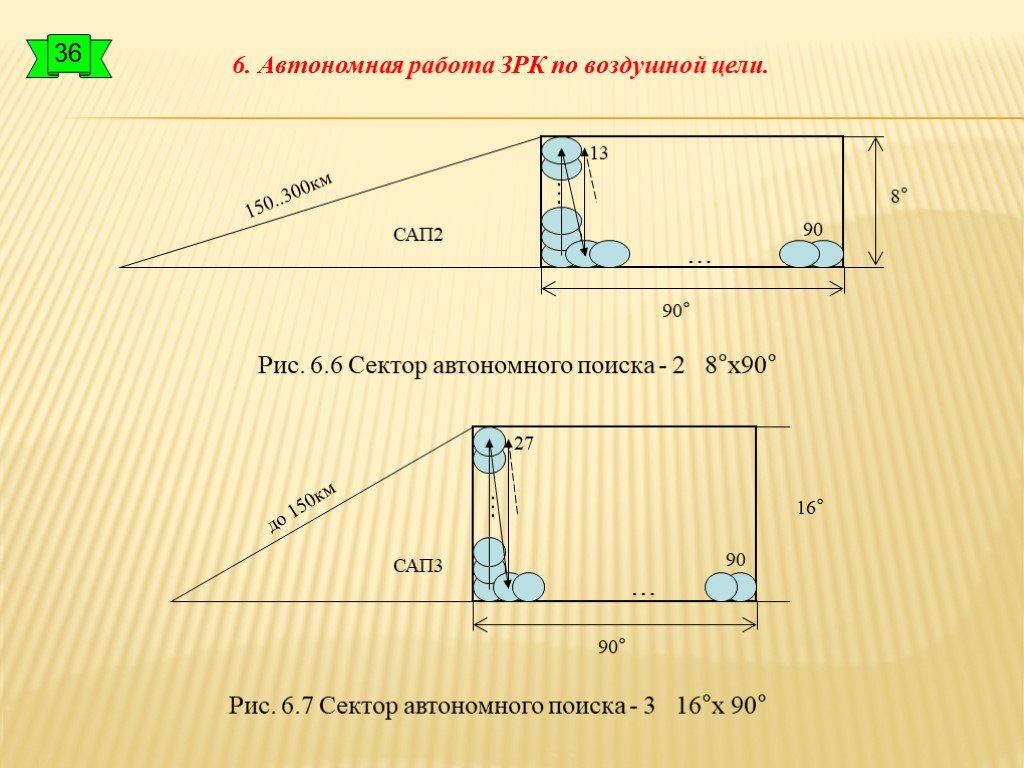 Слайд 34
Слайд 34 Слайд 35
Слайд 35 Слайд 36
Слайд 36 Слайд 37
Слайд 37




























