Слайд 1Асинхронные машины
Асинхронная машина относиться к электрическим машинам переменного тока. Она обратима и может служить для взаимного преобразования электрической энергии переменного тока и механической энергии вращательного движения. Различают трехфазные, двухфазные и однофазные асинхронные машины. Асинхронные генераторы переменного тока применяются относительно редко. Машины мощностью до 0,5 кВт обычно выполняются однофазными и двухфазными. Более мощные машины выполняют трехфазными. Асинхронный двигатель, впервые разработанный в 1889 году русским инженером М.О. Доливо-Добровольский, практически не подвергся серьезным изменениям до наших дней. В основу конструкции асинхронного двигателя положено создание системы трехфазного переменного тока принадлежащее этому же автору. Переменный ток, подаваемый в трехфазную обмотку статора двигателя, формирует в нем вращающееся магнитное поле.

Слайд 2Вращающееся магнитное поле и его особенности
Основными частями асинхронной машины являются: неподвижный стальной кольцевой сердечник, имеющий на внутренней поверхности пазы, в которых уложены катушки электрической обмотки; подвижный стальной цилиндрический сердечник, снабженный электрической обмоткой. Статор и ротор разделены воздушным зазором от 0,1 мм до 1,5 мм. Пакет статора c целью уменьшения потерь на вихревые токи набирают из штампованных изолированных листов электротехнической стали. В пазы статора укладывают обмотку, которая в простейшем случае состоит из трех катушек - фаз, сдвинутых в пространстве на 120 эл. градусов. Ротор асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали. На поверхности ротора имеются продольные пазы для обмотки. Листы сердечника ротора специально не изолируют, т.к. в большинстве случаев достаточно изоляции от окалины.

Слайд 3При включении обмотки статора в сеть, создается вращающееся магнитное поле. Это поле пересекая обмотку ротора наводит в ней ЭДС. Под действием этой ЭДС по обмотке будет протекать ток. Этот ток будет взаимодействовать с магнитным потоком. Взаимодействие вращающего магнитного поля статора с током в роторе создает вращающий момент, за счет которого ротор будет вращаться в ту же сторону, что и поле, но с небольшим отставанием.
При вращении поля n1 в проводнике ротора наведется ЭДС к нам, правило правой руки. Ток также будет направлен к нам. По правилу левой руки проводник с током попал в магнитное поле на него будет действовать сила f, под действием которой ротор будет вращаться в туже сторону, что и магнитное поле статора.
, которые смещены в пространстве по отношению друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты друг от друга во времени на 1/3 периода. Теперь рассмотрим электромагнитное состояние обмоток статора в каждые из")
Слайд 4На статоре трехфазного двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты друг от друга во времени на 1/3 периода. Теперь рассмотрим электромагнитное состояние обмоток статора в каждые из принятых, моментов времени.
Слайд 5Рассмотрим вначале точку t1. Ток в фазе А равен нулю, в фазе С он будет положительным - (+) , а в фазе В - отрицательным (-). Поскольку каждая фазная обмотка имеет замкнутую форму, то конец фазной обмотки В-У будет иметь противоположный знак, т.е. У - (+), а конец Z обмотки C-Z - (-). Проведем силовую магнитную линию вокруг проводников С и У и, соответственно, В и Z (штриховые линии). В момент времени t2 тока в фазе В не будет. В проводнике А фазы А-Х он будет иметь знак (+), а в проводнике С фазы C-Z он будет иметь знак (-).
Электромагнитные состояния трехфазной обмотки статора

Слайд 6Из рисунков наглядно видно, что магнитное поле в обмотках и его поток Ф совершают круговое вращение. Направление вращения магнитного поля определяется порядком чередования токов в фазах обмотки статора: поле поворачивается в сторону фазы с отстающим током. Частота вращения магнитного поля статора определяется следующей формулой:
? 1 = 60? ? об/мин
где f - частота тока питающей сети, Гц; p - число пар полюсов. Если принять f=50 Гц, то для различных чисел пар полюсов (р=1, 2, 3, 4, ) n1=3000, 1500, 1000, 750, об/мин.

Слайд 7Принцип действия асинхронного двигателя
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника, взаимодействуя с полем статора, создает электромагнитную силу - Fэм. Совокупность сил всех проводников обмотки создает электромагнитный момент М, который приводит ротор во вращение в направлении вращающего поля. Пусть ротор вращается с частотой n2 равной частоте вращающегося поля статора n1. В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно, в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может вращаться синхронно c полем статора. Разность между частотами поля статора n2 и ротора n1 называется частотой скольжения Δn. Отношение частоты скольжения к частоте поля называется скольжением:
. Обмотка ротора асинхронного двигателя электрически не связана с обмоткой ст")
Слайд 8В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение Sн обычно составляет от 0,01 до 0,1 %. Частоту вращения ротора можно выразить:
? 2 = ? 1 1−? = 60? ? (1−?)
Обмотка ротора асинхронного двигателя электрически не связана с обмоткой статора. В этом отношении двигатель подобен трансформатору, в котором обмотка статора является первичной обмоткой, а обмотка ротора - вторичной. В отличие от вторичной обмотки трансформатора, неподвижной, обмотка ротора двигателя вместе с ним вращается. ЭДС роторной обмотки, в свою очередь, зависит от частоты вращения ротора.
Синхронная частота вращения магнитного поля статора перемещается относительно ротора с частотой скольжения Δn. Она же наводит в обмотке ротора ЭДС E2, частота которой f2 связана со скольжением S:
? 2 = ? 1 ?

Слайд 9Режимы работы асинхронной машины
Скольжение S=1 – n2=0, ротор неподвижен. Скольжение S=0 – n2 =n1, ток ротора равен 0, момент равен нулю. Скольжение 0n1, генераторный режим, механическая мощность будет преобразована в электрическую, которая будет отдаваться в сеть Р1, а реактивная будет потребляться для создания магнитного потока – Q. Скольжение S>1 – n2
Слайд 10
Слайд 11Магнитные поля и ЭДС асинхронного двигателя
Основной магнитный поток асинхронного двигателя, вращаясь в пространстве, пересекает обмотку статора со скоростью n1 и обмотку ротора со скоростью n2, наводя в них основные ЭДС:
где W1k1 и W2k2 - произведения чисел витков на обмоточные коэффициенты; Е2s=Е2S.
Потоки рассеяния Фрс1 Фрс2 наводят в обмотках ЭДС рассеяния Ер1 и Ер2, которые, как в трансформаторе, могут быть выражены через соответствующие токи I1 и I2 и индуктивные сопротивления х1 и х2s.
где х1 и х2s - индуктивные сопротивления рассеяния обмоток статора и ротора.

Слайд 12Основные уравнения асинхронного двигателя
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора
? 1 = − ? 1 + ? 1 ? 1 + ? 1 ? 1
В роторной обмотке аналогичное уравнение будет иметь вид:
? 2 = ? 2? + ? 2 ? 2? + ? 2 ? 2
Но т.к. роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
0= ? 2 − ? 2 ? 2 − ? 2 ? 2 ?
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
? 1 = ? 01 + − ?′ 2 = ? 01 + − ? 2 ? 2 ? 1

Слайд 13Приведение параметров обмотки ротора к обмотке статора
Для того чтобы параметры ротора и статора изобразить на одной векторной диаграмме, произведем приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2, обмоточным коэффициентом k2 и числом витков W2 заменяют обмоткой с m1×k1×W1, соблюдая при этом энергетический баланс в роторе.
- коэффициент трансформации по ЭДС
1)
Слайд 14- (полная мощность ротора до и после привидения должна быть неизменной)
где
- коэффициент трансформации по току.
2)
Слайд 153)
- (потери в роторе до и после приведения должны быть неизменными)
Для двигателей с фазным ротором
Слайд 164)
- (угол сдвига между ЭДС и током ротора до и после приведения должен быть неизменным)
Соответственно
Далее во всех схемах замещения и на векторных диаграммах будем использовать приведенные параметры ротора.
Слайд 17Векторная диаграмма асинхронного двигателя
1. ? 1 = − ? 1 + ? 1 ? 1 + ? 1 ? 1
2. 0= ?′ 2 − ?′ 2 ?′ 2 − ?′ 2 ?′ 2 ?
3 . ? 1 = ? 01 + − ?′ 2
Слайд 18Схема замещения асинхронной машины
Реально обмотки статора и ротора связаны электромагнитно. Схемы, где электромагнитная связь обмоток заменяется электрической, называются схемами замещения асинхронной машины. В теории асинхронных машин используются две схемы замещения: а) Т-образная; б) Г-образная.
Т-образная схема замещения
Слайд 19Чаще пользуются Г-образной схемой замещения. При переходе к Г-образной схеме замещения: - ток I1 должен оставаться неизменным, т.е. I1 = const; - изменяя скольжение S = 0 ток İ0= İʺ2, т.е. ток İʺ2 должен проходить по тем же сопротивлениям Z1 и Zm; - параметры первичной обмотки и вторичной обмотки соответственно должны измениться на коэффициент С1 и С12.
Слайд 20В Г-образной схеме рабочая ветвь и цепь намагничивания независимы, а сопротивления активные и индуктивные можно просуммировать. В Г-образной схеме замещения:
Слайд 21Энергетическая диаграмма асинхронного двигателя
Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cosϕ1 и отдает приводимому им во вращение механизму механическую мощность Рмх. В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ΔРэл1 и ротора ΔРэл2, магнитные ΔРм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ΔРмх от трения в подшипниках и вращающихся частей о воздух. Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ΔРмх.
Слайд 22
Слайд 231. Активная потребляемая мощность из сети
2. В статоре имеются магнитные потери Рмг, которые определяются из опыта холостого хода и потери в обмотках
3. Рэм – электромагнитная мощность, она электромагнитным путем передается на ротор. В роторе потерями в стали пренебрегаем, т.к. f = (2 - 3)Гц
4. Потери в обмотке ротора Рэл2
Слайд 244. Полная механическая мощность
Тогда
5. Механическая мощность на валу двигателя P2
где Рмх – механические потери вращения, Рдоб – добавочные потери, суммарно эти потери принимаются равными 0,5% от Р1.
6. Коэффициент полезного действия
Слайд 25Уравнение вращающего момента
Вращающий момент в асинхронном двигателе создается взаимодействием тока ротора с магнитным полем машины. Вращающий момент математически можно выразить через электромагнитную мощность машины:
Используя Г-образную схему замещения получим
Слайд 26Зависимость электромагнитного момента от скольжения называется механической характеристикой
Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от U2 квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%.
В момент пуска двигателя, когда n2=0, скольжение S=1, тогда
Механическая характеристика АД
Слайд 27Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2. На рисунке имеются две точки, для которых справедливо равенство Мэм = М2; это точки а и в.

Слайд 28В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2. В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а. Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть - областью неустойчивой работы. Точка б, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы. Максимальному значению вращающего момента соответствует критическое скольжение Sk. Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2 больше пускового МП, двигатель при включении не запустится, останется неподвижным.

Слайд 29Ток, при S = 1 равен пусковому, который в 5-7 раз больше номинального. При S = 0 ток I1 0, т.к. при S = 0 двигателем потребляется реактивная мощность для создания вращающего поля, кроме того, двигателем потребляется активная мощность на покрытие потерь в статоре. При S = 0 ток ротора
т.к
Кривая зависимости M = f(S) характеризуется тремя моментами: а) Пусковой момент Мп при S = 1 б) Максимальный момент Мmax Sкр в) Номинальный момент МН SН Отношение максимального (критического) момента к номинальному, называется перегрузочной способностью
Слайд 30Максимальный (критический) момент
Определим критическое скольжение – Sкр, соответствующего максимальному моменту
обычно , то
Выражение максимального момента
Знак + - соответствует двигательному режиму Знак - - соответствует генераторному режиму При генераторном режиме
Слайд 31Если пренебречь из-за его малости
Слайд 32Расчетная формула вращающего момента
Момент асинхронного двигателя пропорционален потоку и активной составляющей тока ротора.
- угол сдвига фаз тока ротора по отношению к ЭДС ротора
 Слайд 1
Слайд 1 Слайд 2
Слайд 2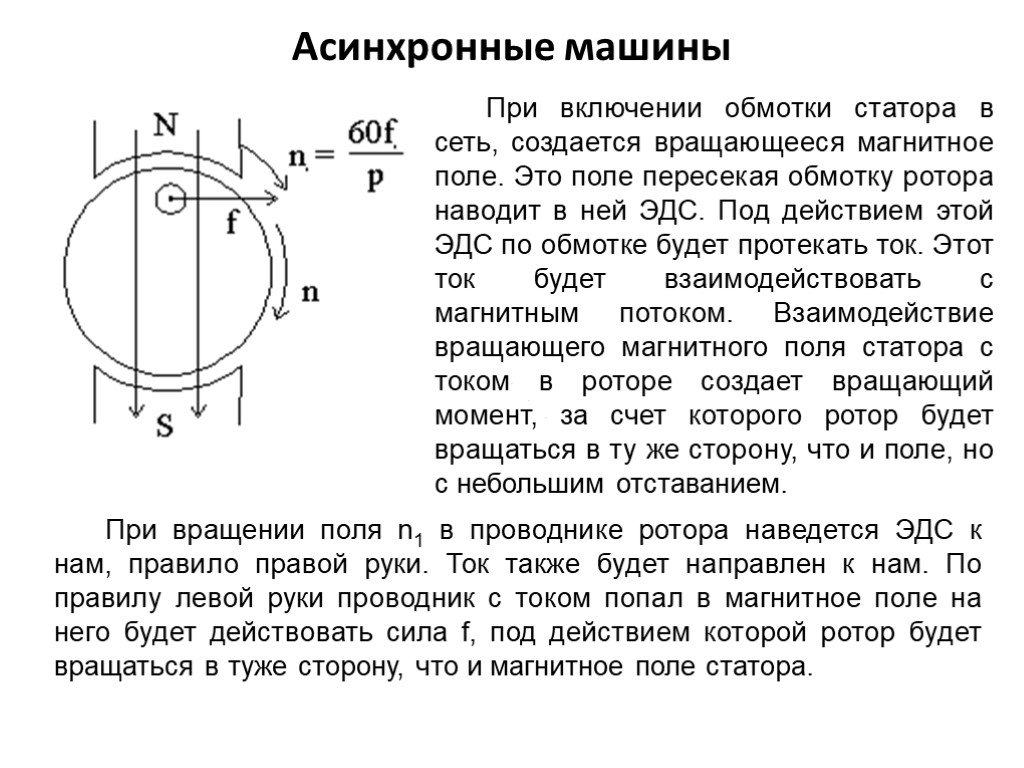 Слайд 3
Слайд 3 Слайд 4
Слайд 4 Слайд 5
Слайд 5 Слайд 6
Слайд 6 Слайд 7
Слайд 7 Слайд 8
Слайд 8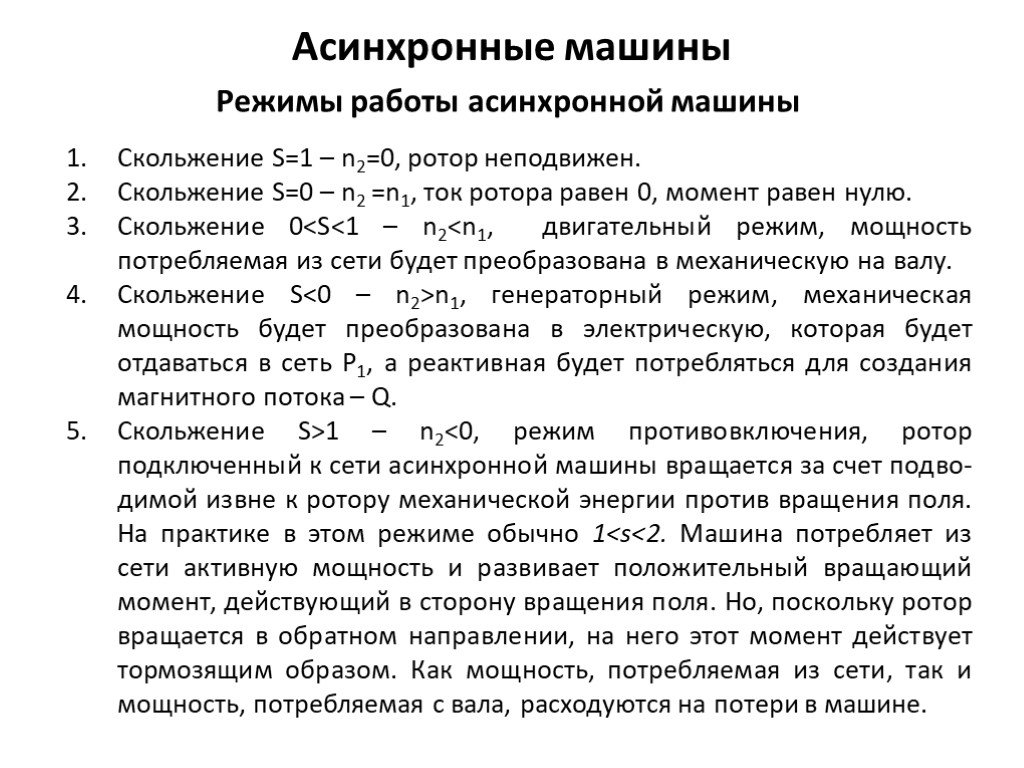 Слайд 9
Слайд 9 Слайд 10
Слайд 10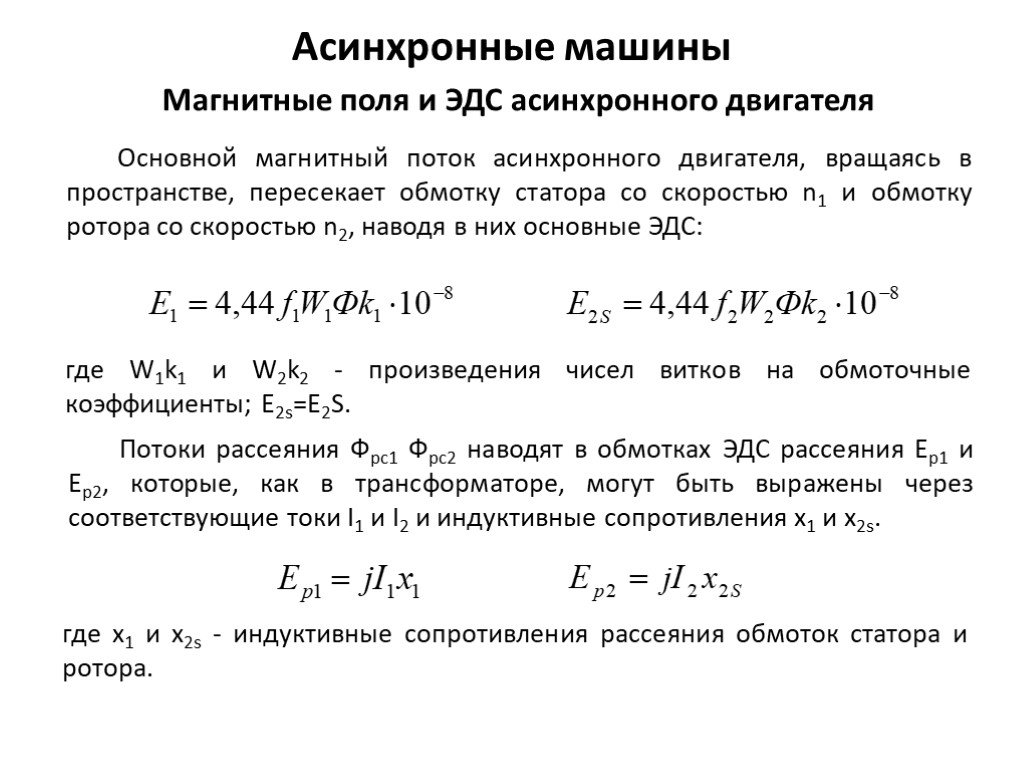 Слайд 11
Слайд 11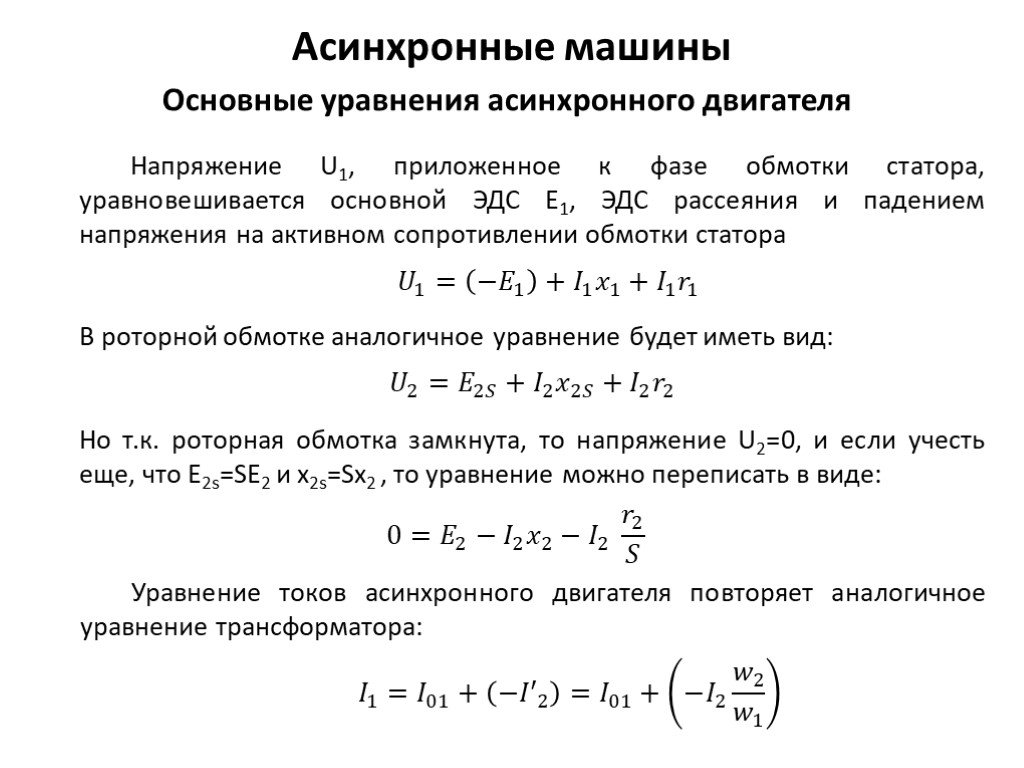 Слайд 12
Слайд 12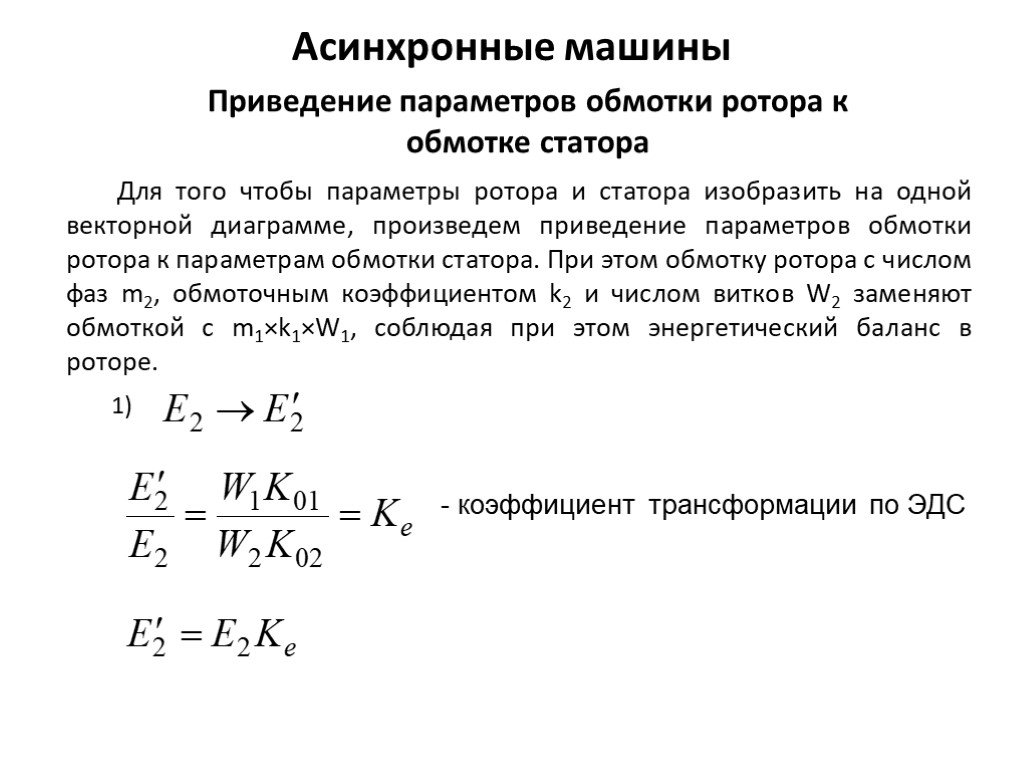 Слайд 13
Слайд 13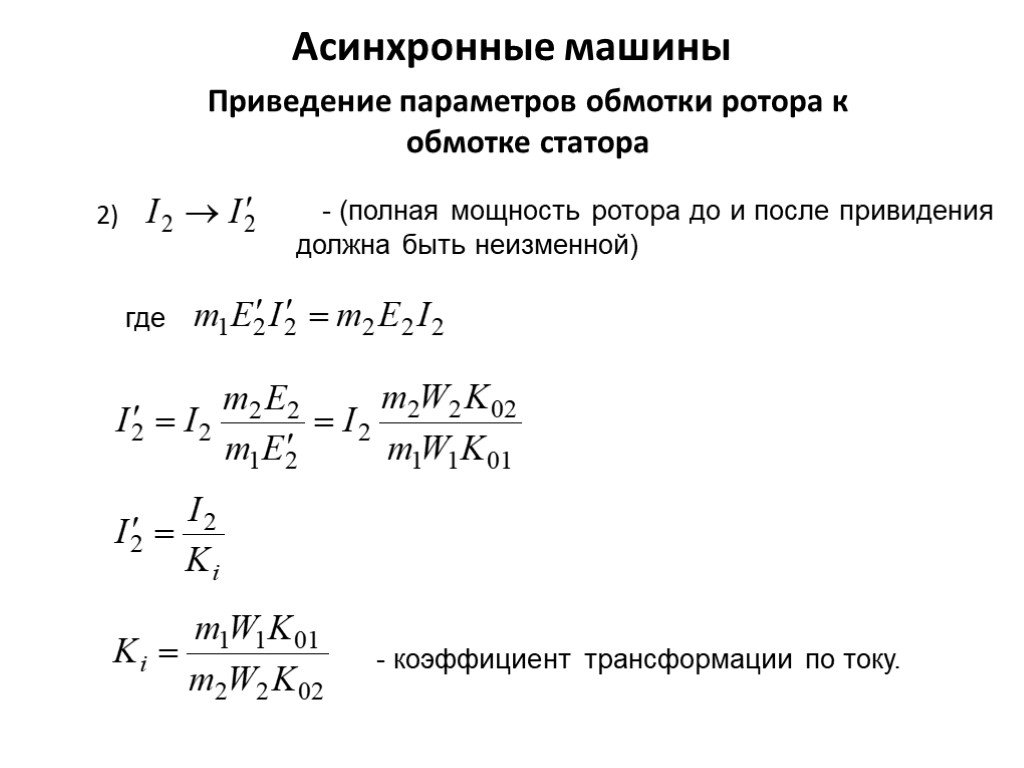 Слайд 14
Слайд 14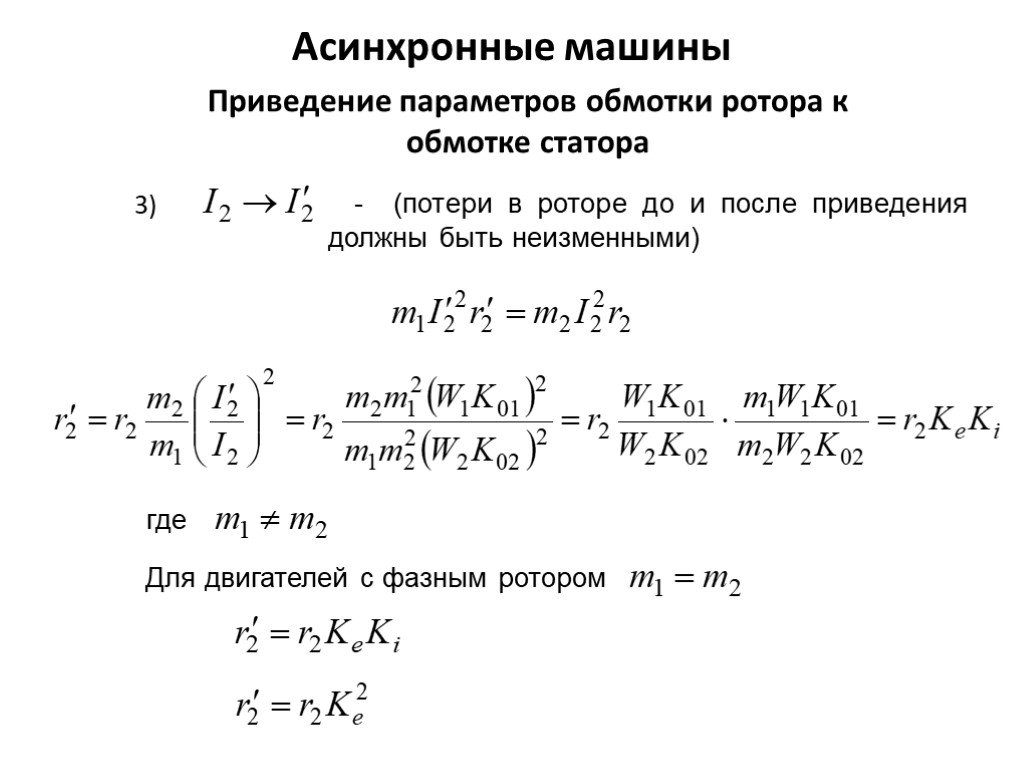 Слайд 15
Слайд 15 Слайд 16
Слайд 16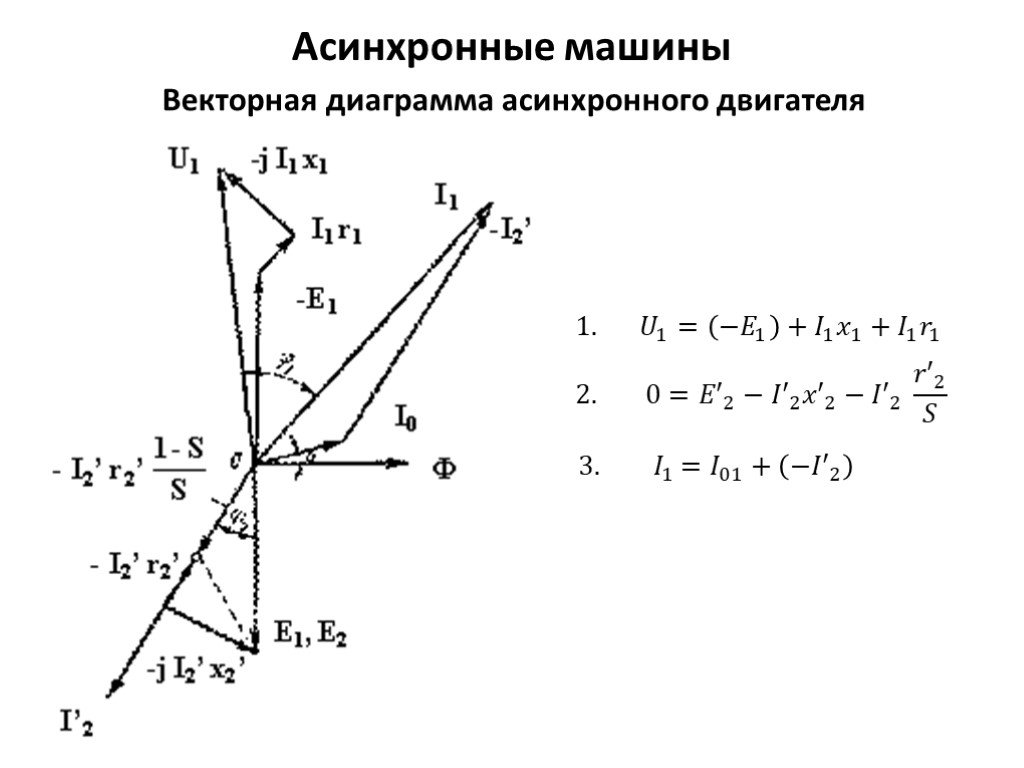 Слайд 17
Слайд 17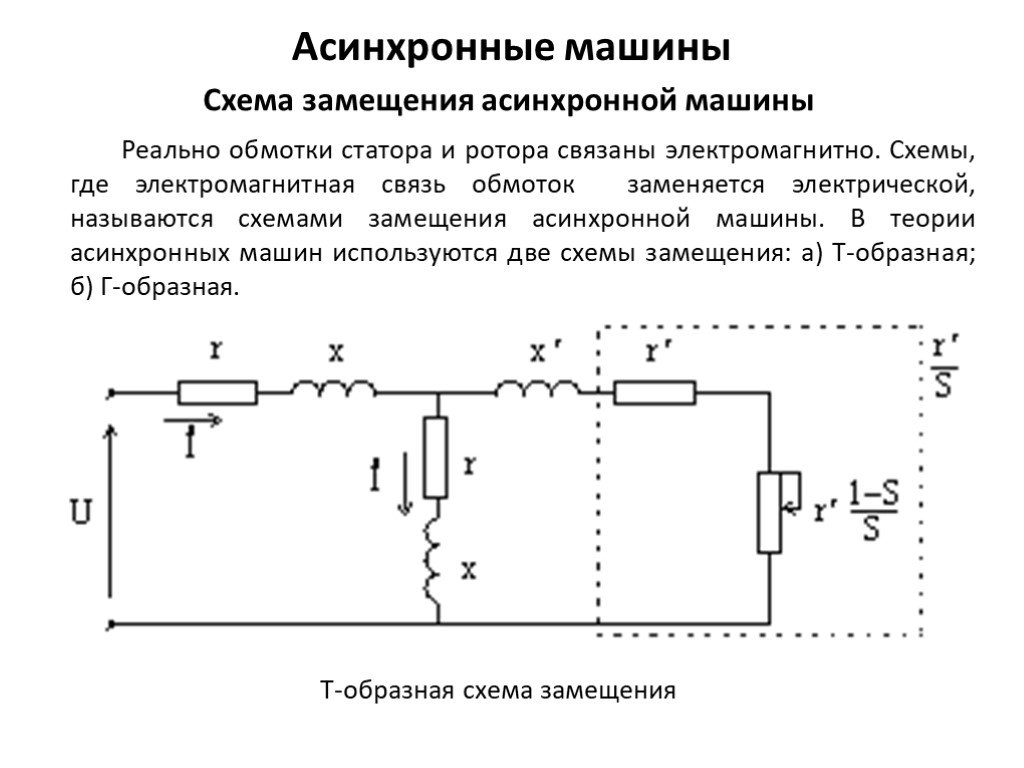 Слайд 18
Слайд 18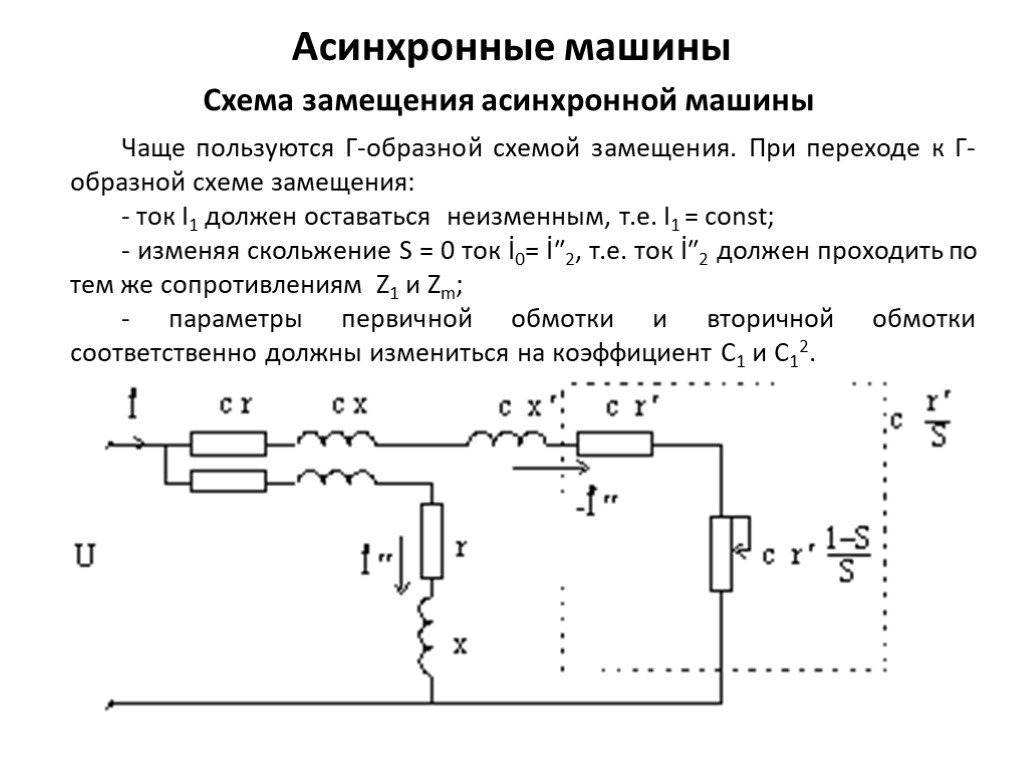 Слайд 19
Слайд 19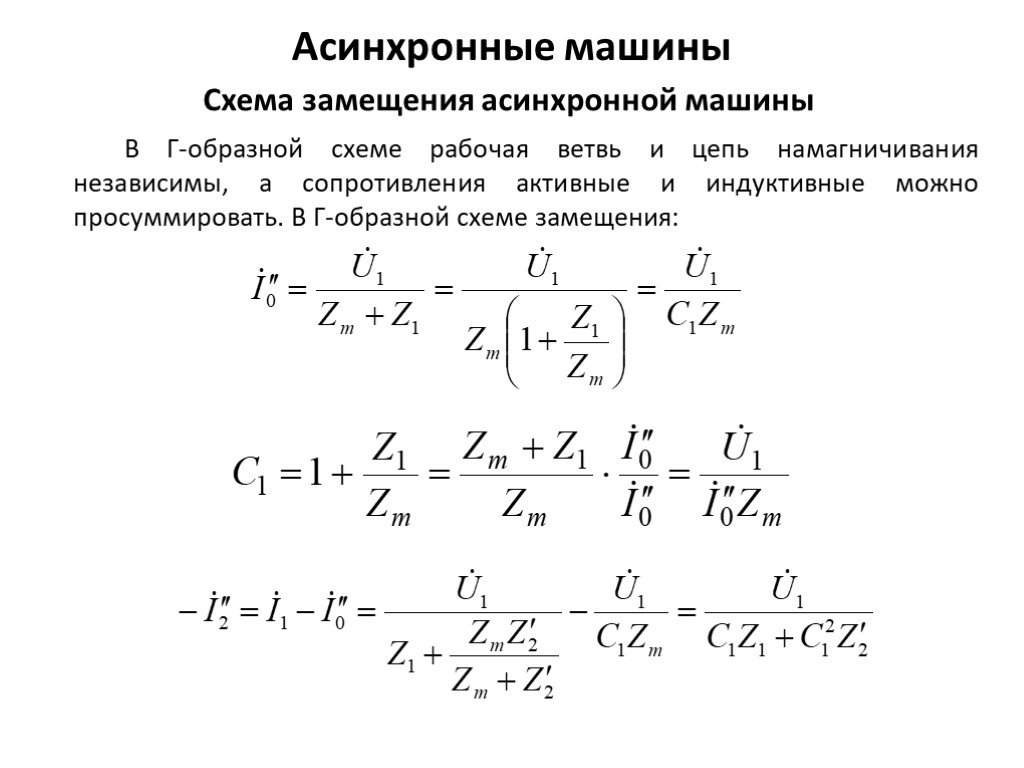 Слайд 20
Слайд 20 Слайд 21
Слайд 21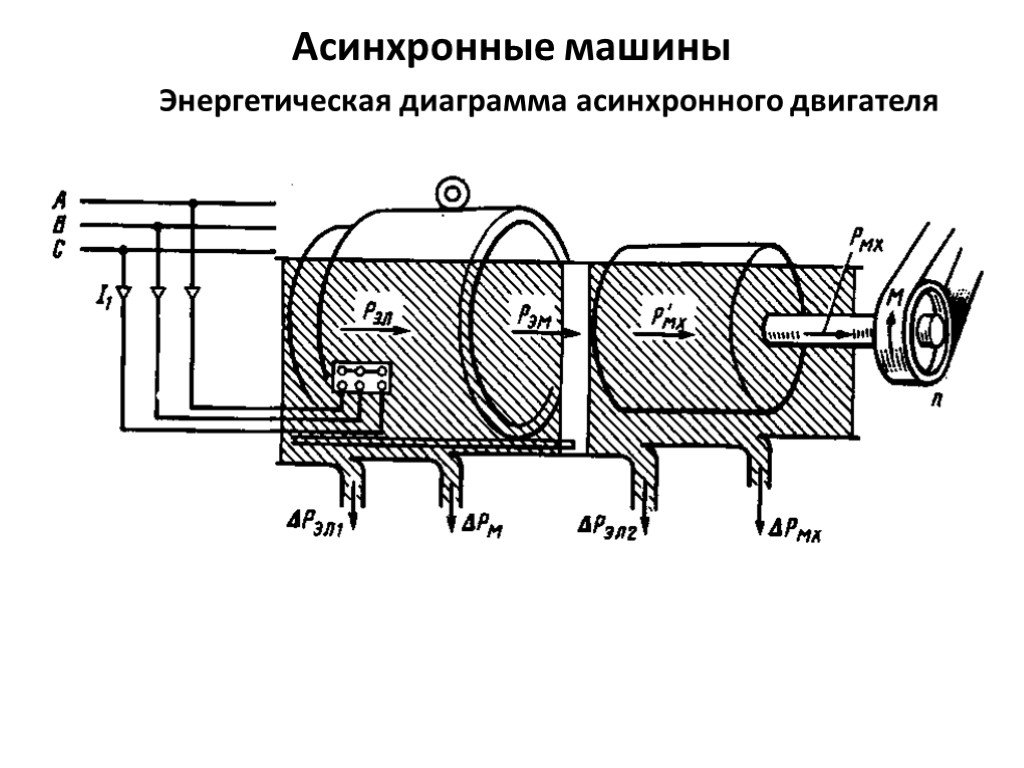 Слайд 22
Слайд 22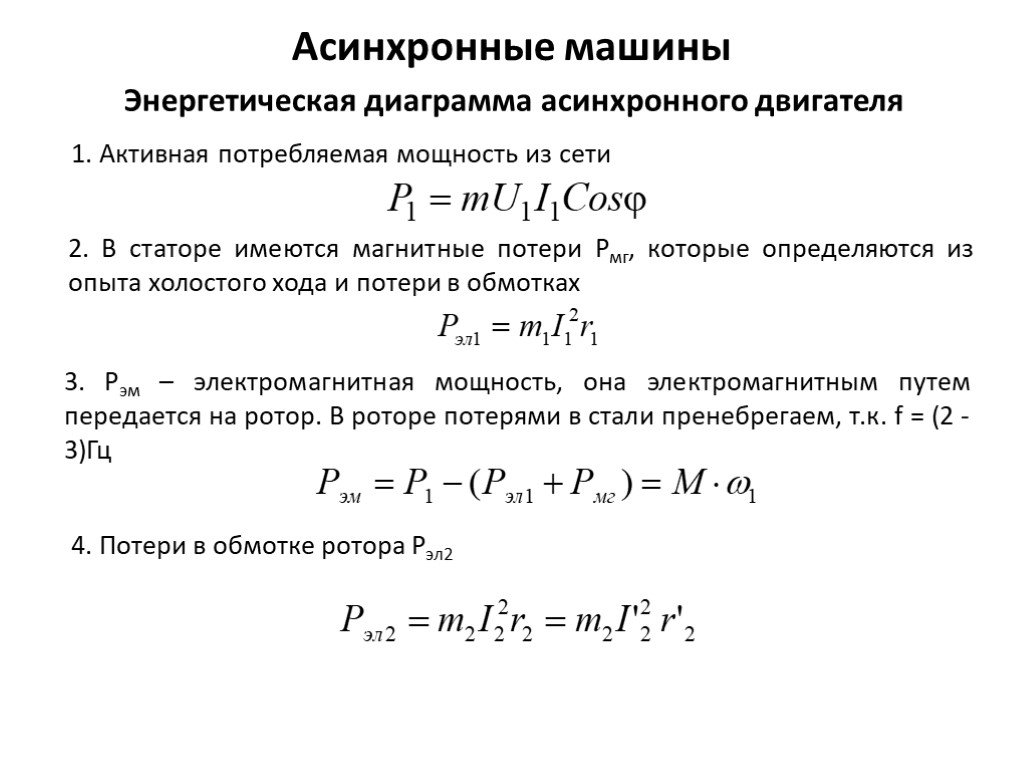 Слайд 23
Слайд 23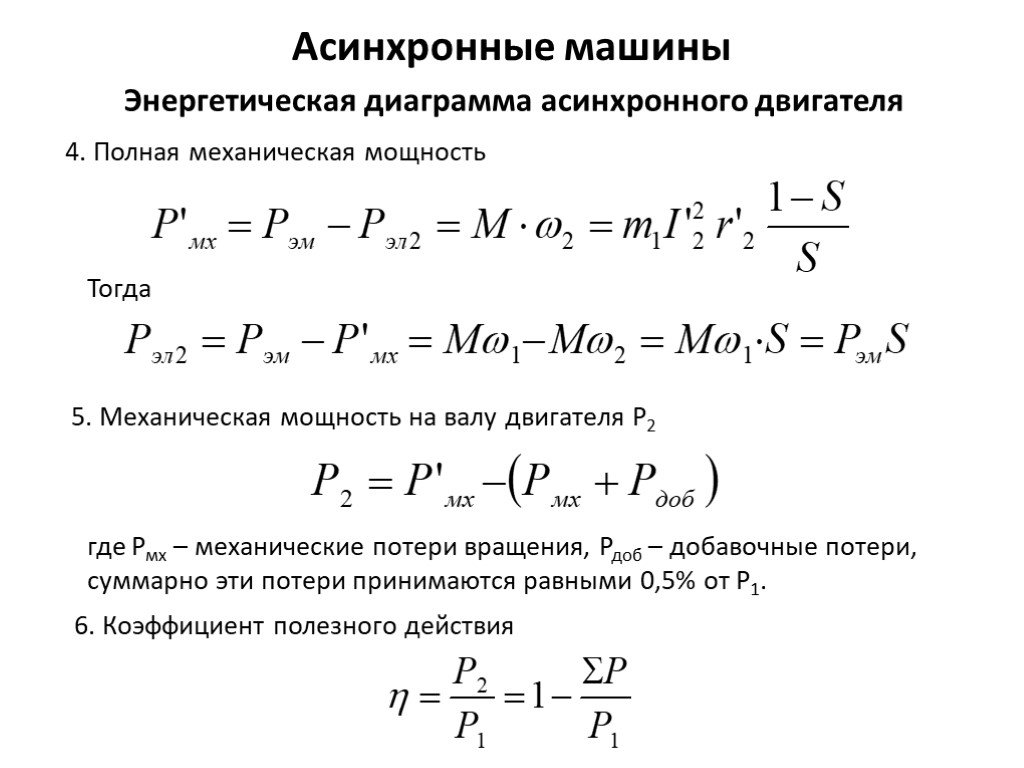 Слайд 24
Слайд 24 Слайд 25
Слайд 25 Слайд 26
Слайд 26 Слайд 27
Слайд 27 Слайд 28
Слайд 28 Слайд 29
Слайд 29 Слайд 30
Слайд 30 Слайд 31
Слайд 31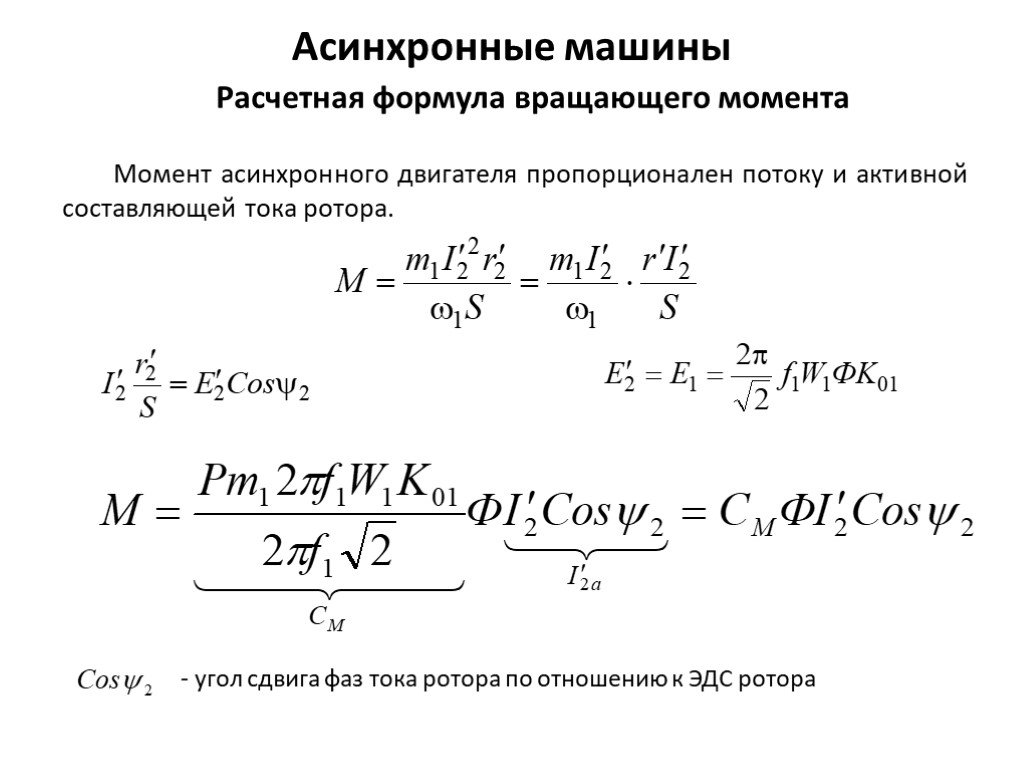 Слайд 32
Слайд 32 Слайд 33
Слайд 33













