Презентация "Внешние переменные и элементы NOLIN в MSC" по информатике – проект, доклад
 Слайд 1
Слайд 1 Слайд 2
Слайд 2 Слайд 3
Слайд 3 Слайд 4
Слайд 4 Слайд 5
Слайд 5 Слайд 6
Слайд 6 Слайд 7
Слайд 7 Слайд 8
Слайд 8 Слайд 9
Слайд 9 Слайд 10
Слайд 10 Слайд 11
Слайд 11 Слайд 12
Слайд 12 Слайд 13
Слайд 13 Слайд 14
Слайд 14 Слайд 15
Слайд 15 Слайд 16
Слайд 16 Слайд 17
Слайд 17 Слайд 18
Слайд 18 Слайд 19
Слайд 19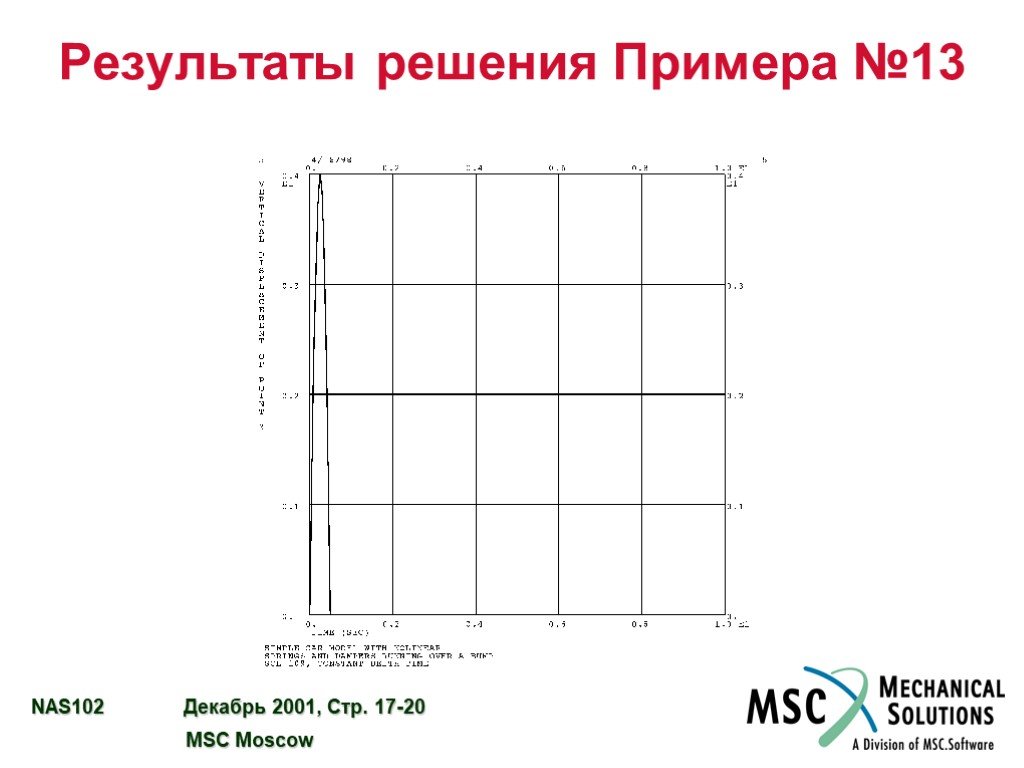 Слайд 20
Слайд 20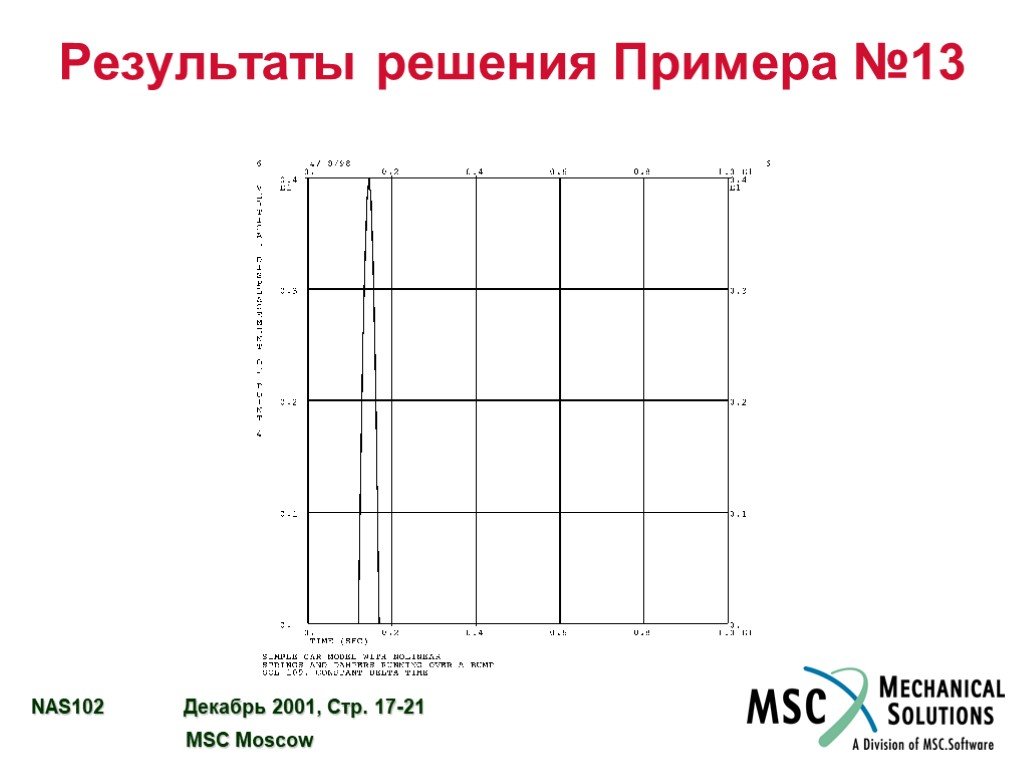 Слайд 21
Слайд 21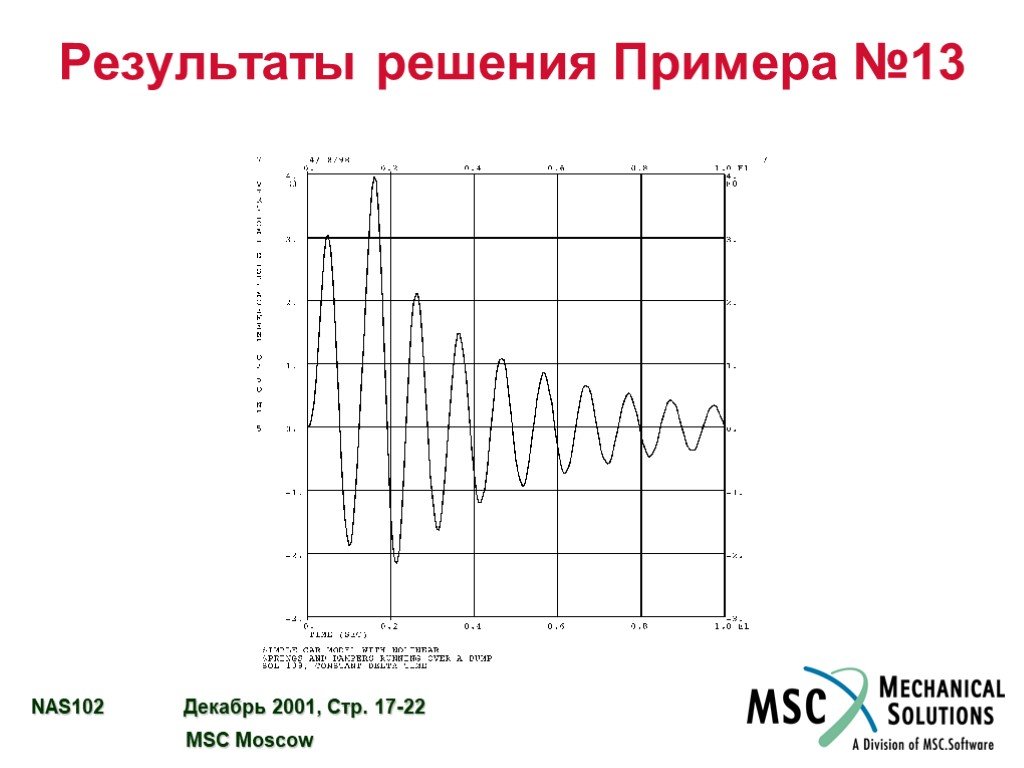 Слайд 22
Слайд 22Презентацию на тему "Внешние переменные и элементы NOLIN в MSC" можно скачать абсолютно бесплатно на нашем сайте. Предмет проекта: Информатика. Красочные слайды и иллюстрации помогут вам заинтересовать своих одноклассников или аудиторию. Для просмотра содержимого воспользуйтесь плеером, или если вы хотите скачать доклад - нажмите на соответствующий текст под плеером. Презентация содержит 22 слайд(ов).
Слайды презентации
Список похожих презентаций

Приложение к программному обеспечению MSC
Этот раздел коротко описывает документацию по MSC Nastran. Краткий обзор этих документов представлен ниже в Таблице 1. MSC Nastran Quick Reference ...
Работа с числовыми данными в Pascal. Целочисленные переменные
Работа с числовыми данными. Урок 5-6. Целые числа. Целочисленные переменные. ЦЕЛОЧИСЛЕННЫЕ переменные:. program z9 ; VAR A, B, C : INTEGER ; Begin ...
Основные элементы системы управления базами данных Access
Требования к базе данных. Для обеспечения оперативности и качества поиска данных в базе данных необходимо автоматизировать этот процесс. Для этого ...
Печать отчета в MSC
Выбрав материал, можно напечатать на принтере отчет. ПЕЧАТЬ ОТЧЕТА. Доступ к печати из Material Browser или Data Viewer Браузер печатает данные в ...
Уравнения динамики движения в MSC
Раздел 10. Уравнения динамики движения. ФОРМИРОВАНИЕ ДИНАМИЧЕСКИХ МАТРИЦ...................................10 - 3 ПРЯМЫЕ МЕТОДЫ АНАЛИЗА.............................................................. ...
Анализ собственных колебаний в MSC
Раздел 3. Анализ собственных колебаний. НЕОБХОДИМОСТЬ ВЫПОЛНЕНИЯ АНАЛИЗА СОБСТВЕННЫХ КОЛЕБАНИЙ… 3 - 3 ОБЗОР ТЕОРИИ……………………………………………………………………………… 3 ...
Внешние устройства ЭВМ
Состав внешних устройств ЭВМ. Внешние устройства делятся на два вида: внешние ЗУ устройства ввода-вывода (УВВ): клавиатура, дисплей, принтер, мышь, ...
Составляющие элементы среды программирования Visual Basic. Разработка первого проекта
Постановка целей урока. Обучающие Общеобразовательные. Образовательные цели. Учащиеся должны знать составляющие среды Visual Basic. Учащиеся должны ...
Внешние устройства компьютера
Устройства ввода. Что такое устройства ввода? Устройством ввода называется устройство, которое: позволяет человеку отдавать компьютеру команды и/или ...
Внешние устройства компьютера
Устройства ввода: Клавиатура Мышь Сканер Графический планшет Световое перо микрофон. Устройства вывода Монитор Принтер Плоттер Колонки наушники. Клавиатура ...
Внешние запоминающие устройства
Количество информации увеличивается, следовательно ВЗУ необходимо совершенствовать. ВЗУ – основной носитель и хранитель информации, который постоянно ...
Введение в MSC
MSC.MVISION – база данных, содержащая свойства материалов. Поставщики информации о материалах. Потребители информации о материалах. Контроль соответствия ...
Бездеформационные методы колебаний в MSC
Раздел 5. Бездеформационные моды колебаний. БЕЗДЕФОРМАЦИОННЫЕ МОДЫ И ВЕКТОРЫ. АСПЕКТЫ ТЕОРИИ……………… 5 - 3 ВЫЧИСЛЕНИЕ БЕЗДЕФОРМАЦИОННЫХ МОД.………………………………………. ...
Расчет антисимметричного летательного аппарата в MSC
Описание конструкции ЛА. Размах крыла: 12 м Хорда: 2 м Передняя кромка крыла: на расстоянии 0.3 м от точки отсчета Носок: на расстоянии 2 м от точки ...
Графический интерфейс пользователя UNIX в MSC
Значок указателя мыши изменяется в зависимости от расположения мыши относительно окна Курсор мыши должен быть где-нибудь в окне прежде, чем Вы сможете ...
Расчет статической аэроупругости в MSC
Цель. Целью расчета статической аэроупругости является определение нагрузок на ЛА при стационарном или квазистационарном маневре. Маенвр описывается ...
Демпфирование в MSC
Раздел 6. Демпфирование. ДЕМПФИРОВАНИЕ…………………………………………………………………………… 6 - 3 КОНСТРУКЦИОННОЕ И ВЯЗКОЕ ДЕМПФИРОВАНИЕ………………………………… 6 - 4 КОНСТРУКЦИОННОЕ ...
Текстовые редакторы и редакторы иконок в MSC
Текстовые редакторы и редакторы иконок. Текстовые редакторы и редакторы иконок (продолжение). Текстовый редактор vi – обзор команд. Текстовый редактор ...
Динамический анализ в MSC
Corporate MSC.Software Corporation 815 Colorado Boulevard Los Angeles, CA 90041-1777 Telephone: (323) 258-9111 or (800) 336-4858 FAX: (323) 259-3638 ...
Шпаргалка по командам Unix в MSC
Шпаргалка по командам Unix. Шпаргалка по командам Unix (продолжение). . ...Конспекты
Логические элементы ПК. Построение функциональных схем
Автор Зорина Ольга Александровна. . Место работы МБОУ СОШ №7 г.Новый Уренгой. Должность учитель информатики. . Урок информатики в 9 классе. ...Структура окна Word и его элементы
. . «Структура окна Word. и его элементы». Цель:. . Познакомить учащихся с приемами управления документами, набора, редактирования и оформления ...Excel: основные элементы интерфейса
. ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ. . НАЧАЛЬНОГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ. ПРОФЕССИОНАЛЬНОЕ УЧИЛИЩЕ № 27. ...Советы как сделать хороший доклад презентации или проекта
- Постарайтесь вовлечь аудиторию в рассказ, настройте взаимодействие с аудиторией с помощью наводящих вопросов, игровой части, не бойтесь пошутить и искренне улыбнуться (где это уместно).
- Старайтесь объяснять слайд своими словами, добавлять дополнительные интересные факты, не нужно просто читать информацию со слайдов, ее аудитория может прочитать и сама.
- Не нужно перегружать слайды Вашего проекта текстовыми блоками, больше иллюстраций и минимум текста позволят лучше донести информацию и привлечь внимание. На слайде должна быть только ключевая информация, остальное лучше рассказать слушателям устно.
- Текст должен быть хорошо читаемым, иначе аудитория не сможет увидеть подаваемую информацию, будет сильно отвлекаться от рассказа, пытаясь хоть что-то разобрать, или вовсе утратит весь интерес. Для этого нужно правильно подобрать шрифт, учитывая, где и как будет происходить трансляция презентации, а также правильно подобрать сочетание фона и текста.
- Важно провести репетицию Вашего доклада, продумать, как Вы поздороваетесь с аудиторией, что скажете первым, как закончите презентацию. Все приходит с опытом.
- Правильно подберите наряд, т.к. одежда докладчика также играет большую роль в восприятии его выступления.
- Старайтесь говорить уверенно, плавно и связно.
- Старайтесь получить удовольствие от выступления, тогда Вы сможете быть более непринужденным и будете меньше волноваться.
Информация о презентации
Дата добавления:4 мая 2019
Категория:Информатика
Содержит:22 слайд(ов)
Поделись с друзьями:
Скачать презентацию









