Слайд 1Электроприводы грузоподъемных механизмов
Слайд 2Классификация судовых ГПМ
По типу устройства судовые ГПМ подразделяются на механизмы общего назначения (лебедки, краны, транспортеры), специфические судовые механизмы (лифты, шлюпочные, траловые и буксирные лебедки, механизмы технологической линии судов технического флота) По режиму работы ГПМ делятся на Механизмы кратковременного режима, Механизмы повторно-кратковременного режима Грузоподъемные механизмы бывают с одним, двумя и тремя электродвигателями. В настоящее время выпускаются судовые подъемные механизмы пяти грузоподъемностей: 0,5; 1,5; 3; 5 и 10 т Механизмы грузоподъемностью 0,5 и 1,5 т, как правило, устанавливаются на речных судах
; лебедки специального назначения (на специ")
Слайд 3К судовым грузоподъемным устройствам относят разнообразные по назначению, конструкции, мощности и характеру работы палубные механизмы: грузовые лебедки и краны; шлюпочные, траловые, шланговые лебедки; тельферы, лифты (провизионные, грузовые и пассажирские); лебедки специального назначения (на специальных судах) — буксирные, траловые, лоткоподъемные, глубоководные якорные и т. д. Электроприводы судовых грузоподъемных устройств могут различаться: по виду механической передачи — с цилиндрической, червячной и гидравлической передачей; по режиму работы — повторно-кратковременного, кратковременного и перемежающегося режимов; по режиму вращения двигателя — с прерывистым и непрерывным вращением двигателя; по системе управления — контроллерные, контакторные, электромашинные, тиристорные; по роду тока — постоянного и переменного тока

Слайд 4Грузовые лебедки и краны
Грузовые лебедки предназначены для работы в совокупности с грузовыми стрелами Вращение электродвигателя через цилиндрический редуктор передается барабану с грузовым тросом, который через блоки обеспечивает подъем или спуск гака При грузовых операциях отдают предпочтение спаренной работе двух лебедок на общий гак по системе «телефон». Грузовые краны имеют три механизма: подъема груза, подъема и спуска стрелы; поворота крана: Каждый механизм снабжается электродвигателем с аппаратурой управления В электрогидравлических кранах устанавливают общий насосный агрегат, обеспечивающий работу регулируемых автономных гидравлических двигателей В этом случае функции электропривода просты: обеспечить постоянное вращение насоса в одном направлении; механическая часть привода усложняется, повышается стоимость Приводу грузовых лебедок и кранов с механической передачей приходится работать в жестких условиях непрерывных пусков, реверсов, и торможений, которым не отвечают обычные двигатели: Применяют электродвигатели специальной крановой серии ДПМ на постоянном и МАП на переменном токе При непосредственном питании от цепи используют двигатели смешанного, в системе Г—Д — параллельного возбуждения, а на переменном токе полюсопереключаемые двух- и трехскоростные

Слайд 5Требования к судовым ГПМ
К электроприводам ГПМ предъявляются следующие требования: надежность и безопасность в работе, безотказность при кренах и дифферентах, при вибрации, сотрясении и толчках, а также при резких колебаниях температуры; минимальная длительность переходных процессов; надежное электрическое торможение в режиме спуска полного груза; точная остановка при торможении; наличие автоматического нормально замкнутого тормоза с устройством для ручного растормаживания; обеспечение заданной производительности и регулирование частоты вращения в диапазоне 20 — 100 % в двигательном режиме при полной нагрузке; устойчивая работа на малых посадочных скоростях; обеспечение значительных скоростей операций с порожними захватами (до 300 % номинальной); обеспечение увеличенных скоростей спуска грузов при работе в рекуперативном режиме (до 200% номинальной); безусловная остановка привода по воле оператора, независимо от возможных неисправностей или отказов отдельных элементов системы

Слайд 6Особенности работы ЭП ГПМ
Большая частота пусков и торможений Пуск под полной нагрузкой Работа с переменной нагрузкой от 10 до 100 % Работа с кратковременной перегрузкой Наличие значительных механических перегрузок на вал и подшипники электродвигателя Возможность обливания водой электрооборудования палубных грузоподъемных механизмов Для грузоподъемных механизмов создана специальная серия крановых электродвигателей кратковременного и повторно-кратковременного режима, брызгозащищенного и водозащищенного исполнений, усиленной механической конструкции, с высокими перегрузочными свойствами. Условия работы грузоподъемных механизмов требуют привода от реверсивного электродвигателя с электрическим регулированием скорости при подъеме и спуске грузов, с электрическим и механическим торможением Механический тормоз применяется для удержания груза на весу и для остановки электродвигателя в конце периода электрического торможения В соответствии с ГОСТ 12617—78 электродвигатель, питаемый непосредственно от сети переменного тока, должен развивать на всех обмотках, кроме обмотки наименьшей скорости, расчетный пусковой момент при номинальном напряжении 1,5 — 2,5МНОМ. На обмотке наименьшей скорости расчетный пусковой момент при номинальном напряжении должен быть не менее 1,3МНОМ Диапазон скоростей определяется необходимостью иметь очень низкую скорость для безопасной посадки груза (4 — 6 м/мин) и максимальную при операциях с холостым гаком (120 — 180 м/мин)

Слайд 7Грузовая лебедка
Механизм, обслуживающий грузовое устройство судна, которое предназначено для погрузки и разгрузки на рейдовой стоянке или у немеханизированного причала Основной частью грузового устройства является грузовая стрела с такелажем Нижний конец стрелы 7 шарнирно закреплен при помощи подпятника 1 у основания мачты или грузовой колонны 2, а верхний конец — нок — поддерживается переброшенным через блок топенантом 3 и раскреплен двумя боковыми оттяжками 6 Нижние концы оттяжек прикреплены через полиспасты к палубе судна по обеим сторонам от стрелы Шкентель 5 одним концом закреплен на барабане грузовой лебедки 10 и переброшен через нижний и верхний блоки 9 и 4 На втором конце шкентеля прикреплено грузозахватное приспособление — гак 8 Вылет стрелы уменьшают, наматывая лопарь топенанта 12 на турачек 11 лебедки После установки стрелы в нужное положение и раскрепления ее оттяжками топенант прикрепляют к палубному глаголь-гаку при помощи отрезка цепи 13 и снимают лопарь с турачка, освобождая лебедку для работы с грузом
1 – подпятник 2 – грузовая колонна 3 – топенант 4 – верхний блок 5 – шкентель 6 – боковые оттяжки
7 – стрела 8 – гак 9 – нижний блок 10 – барабан лебедки 11 – турачек 12 – лопарь топенанта

Слайд 8Погрузка при помощи двух стрел и двух лебедок
Грузовые операции обычно осуществляют при помощи двух грузовых стрел, каждая из которых оборудована отдельной лебедкой Нок одной стрелы располагают над люком трюма, а другую стрелу выводят за борт судна В этом положении обе стрелы — трюмную и бортовую— раскрепляют неподвижно оттяжками Концы обеих шкентелей присоединяют к общему гаку
Работу при погрузке судна ведут в таком порядке: поднимают груз лебедкой бортовой стрелы, вторая лебедка выбирает образующуюся при этом слабину своего шкентеля; перемещают груз поперек судна; трюмная лебедка выбирает шкентель и подтягивает груз, а бортовая поддерживает его, работая в режиме тормозного травления;
опускают груз в трюм трюмной лебедкой, бортовая же травит свой шкентель вхолостую; поднимают пустой гак трюмной лебедкой, а бортовая в это время выбирает слабину; перетягивают гак к причалу бортовой лебедкой, трюмная же при этом соответственно травит свой шкентель; опускают гак бортовой лебедкой, а вторая лебедка продолжает травить свой шкентель

Слайд 9Кинематическая схема грузовой лебедки
1 – электродвигатель 2 – турачек 3 – грузовой барабан 4 – кулачковая муфта 5 – ленточный тормоз 6, 8 – большие шестерни редуктора 7 – муфта 9 – вал 10 – цилиндрический двухступенчатый двухскоростной редуктор 11 – муфта 12 – механический тормоз В отсоединенном состоянии грузовой барабан можно затормозить ленточным тормозом с приводом от ножной педали (возможность работать турачкам независимо от грузового барабана, даже если на гаке висит груз) Турачки грузовых лебедок используют также во время швартовных операций Грузоподъемность судовых лебедок составляет обычно 1,5; 3; 5; 10 т, у двухскоростных лебедок при переключении редуктора обратно пропорционально скорости изменяется и грузоподъемность
: Участок I – подъем груза с причала Участок II – перемещение груза к люку трюма Участок III – спус")
Слайд 10Упрощенная нагрузочная диаграмма электропривода подъемной лебедки поворотного крана
На диаграмме показаны только участки установившейся работы (нагрузка электропривода в переходных режимах не учтена): Участок I – подъем груза с причала Участок II – перемещение груза к люку трюма Участок III – спуск груза в трюм Участок IV – пауза в работе электродвигателя, вызванная расстропкой груза в трюме
Участок V – подъем холостого гака из трюма Участок VI – поворот крана без груза Участок VII – спуск пустого гака на причал Участок VIII – застропка груза на причале После застропки начинается новый цикл работы В среднем таких циклов получается 25 — 50 в час Продолжительность включения электропривода достигает 40 % (эти же цифры характеризуют и грузовые операции, выполняемые спаренными лебедками)
Слайд 11Нагрузочная диаграмма электропривода грузового поворотного крана
a — механизм подъема груза; б — механизм изменения вылета стрелы; в — механизм поворота крана

Слайд 12Электроприводы лифтов
На судах применяются пассажирские и грузовые лифты Обычно судовые лифты имеют одну рабочую скорость, значение которой зависит от грузоподъемности и колеблется в интервале 6 — 30 м/мин Некоторые лифты имеют две скорости с регулированием 1 : 3, причем малая скорость лежит в пределах 2 — 3 м/мин, что обеспечивает точную остановку По соображениям надежности работы предельно допустимая скорость кабины не должна превышать (1,15—1,4) номинальной скорости Режим работы электроприводов судовых лифтов повторно-кратковременный (ПВ до 40 %), причем пассажирские лифты имеют пиковую загрузку в определенные часы суток Число пусков электродвигателей судовых лифтов не превышает 120 в час Некоторые исполнения лифтов предусматривают противовесы, которые снижают нагрузки на лебедки и мощность приводного двигателя При расчетах мощности электропривода следует иметь в виду, что если подъем осуществляется с номинальным грузом, то опускание происходит при пустой кабине

Слайд 13К электроприводам лифтов предъявляются следующие основные требования: лифт должен быть оборудован электромагнитным тормозом, конечными выключателями и ограничителями; с момента начала движения кабины должна быть исключена возможность управления лифтом любыми кнопками, за исключением кнопки «Стоп». на посту управления должна быть предусмотрена сигнализация, указывающая, что лифт занят, схема электропривода лифта должна исключать возможность пуска его в ход при открытых дверях кабины, ослабленном канате и посадке кабины на ловители обрыва троса

Слайд 14Эскиз привода лифта: Канат прикреплен к ловителю, установленному на крыше кабины, и переброшен через барабан лебедки к противовес Ловитель представляет собою рычажное пружинное устройство, которое при обрыве троса или чрезмерном увеличении скорости спуска кабины заклинивает ее по направляющим шахты
Устройство лифта: 1 – противовес 2 – кабина 3 – ловитель 4 – вертикальная шахта 5 – лебедка 6 – трос 7 – двери шахты 8 – палубные переключатели

Слайд 15Электроприводы шлюпочных лебедок
Лебедки, служащие для подъема шлюпок, ботов и катеров: используемые при выполнении текущих судовых, промысловых работ и т. п. Эти лебедки, как правило, имеют устройства для безопасного подъема с волны, соответствующее управление и скоростные характеристики; шлюпочные В соответствии с Международной конвенцией по охране человеческой жизни на море все морские и речные суда снабжаются спасательными шлюпками, располагаемыми на специальном подъемном устройстве, называемом шлюпбалкой Шлюпки спускают без электропривода при подтормаживании регулируемым механическим тормозом: Наибольшая скорость спуска 30 м/мин Спуск подвесок можно выполнять вручную или с применением электропривода Шлюпочные лебедки ЛЭРШ обеспечивают подъем шлюпок и спуск порожних подвесок с помощью реверсивного электропривода В новых конструкциях лебедок ЛШ спуск порожних подвесок электроприводом исключен – конструкция механизма и электропривод стали проще: Основной режим работы — одноразовый подъем шлюпки в течение 5 мин при скорости 6 — 8 м/мин Нужда в каком-либо регулировании отсутствует Электропривод должен быть односкоростным кратковременного режима. Двигатель выбирают по условию обеспечения пуска при наибольшей расчетном нагрузке
. Автоматические буксирные лебедки обеспечивают безопасность плавания при буксировке судов. Они сглаживают дополнительные тяговые усилия, возникающие в результате неодновременного воздействия волн и ветра на буксирное и буксируемое суда Буксирная лебедка выполня")
Слайд 16Автоматические буксирные лебедки (АБЛ)
Автоматические буксирные лебедки обеспечивают безопасность плавания при буксировке судов. Они сглаживают дополнительные тяговые усилия, возникающие в результате неодновременного воздействия волн и ветра на буксирное и буксируемое суда Буксирная лебедка выполняет следующие основные функции в процессе буксирования: обеспечивает установление необходимой длины буксирного троса, удерживает трос в процессе буксировки, обеспечивает вытравливание некоторой длины троса для амортизации ударов Резкие рывки буксирного троса могут вызвать его обрыв, а при маневрировании — даже опрокидывание буксира Чрезмерная слабина и провисание троса могут привести к наматыванию его на винт буксира. В принятых для отечественных АБЛ системах контроля натяжения троса применяется пружинный измеритель усилия в тросе с контактным датчиком и аппарат контроля длины вытравливаемого троса Пружинный механизм (взвешивающее устройство) осуществляет настройку лебедки на заданное тяговое усилие буксировки, при повышении которого происходит автоматическое стравливание, а при понижении — автоматическое выбирание буксирного троса Определенному тяговому усилию в тросе будет соответствовать определенная схема включения электродвигателя Электродвигатель выбирают по основному условию — выбирание троса при номинальном тяговом усилии

Слайд 17Грузовая лебедка с двухскоростным АД серии МАП
Слайд 18Электропривод грузовой лебедки на постоянном токе
Слайд 19Электропривод грузового лифта
Кн – кабина (сброс) КнП1 – кабина (вызов) КнП2 – палуба (вниз) КнП3 – палуба (вверх) КнП4 – трюм (вниз) КнП5 – трюм (вверх) КнП6 – кабина (вниз) КнП7 – кабина (вверх) В3 – натяжение троса В4 – балансирный подвес В5, В7, В8, В10 – двери В6 – ограничитель скорости В9 – уловитель Л2 – управление из кабины
Слайд 20Электропривод буксирной лебедки переменного тока
Слайд 21Шлюпочная лебедка
 Слайд 1
Слайд 1 Слайд 2
Слайд 2 Слайд 3
Слайд 3 Слайд 4
Слайд 4 Слайд 5
Слайд 5 Слайд 6
Слайд 6 Слайд 7
Слайд 7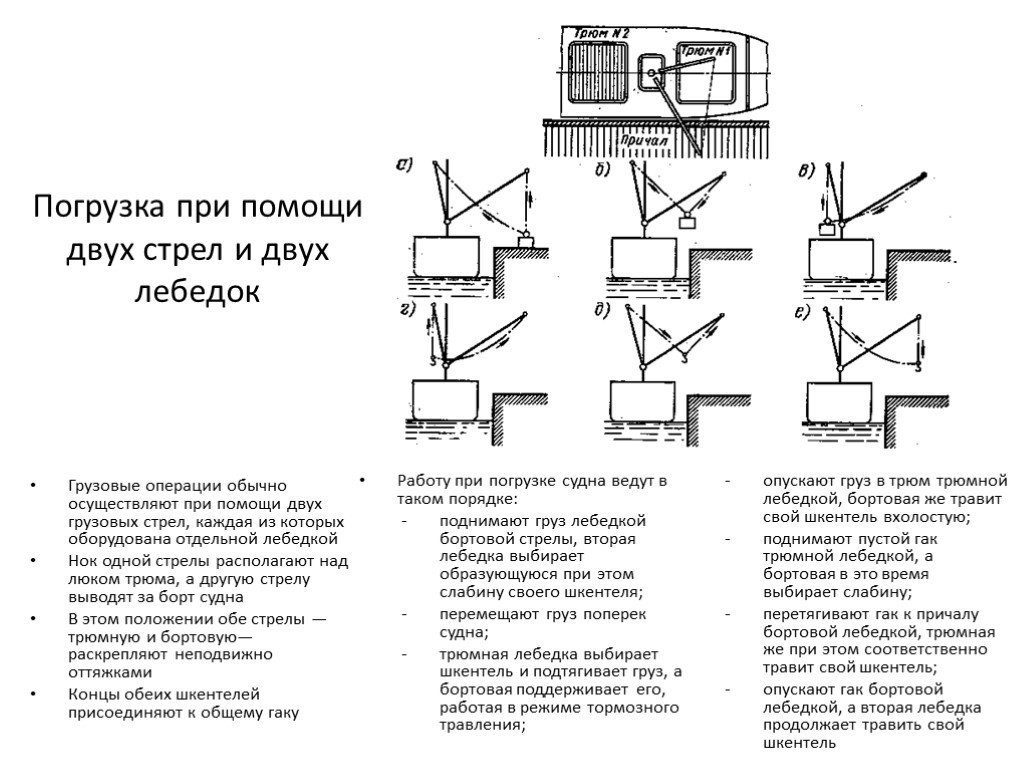 Слайд 8
Слайд 8 Слайд 9
Слайд 9 Слайд 10
Слайд 10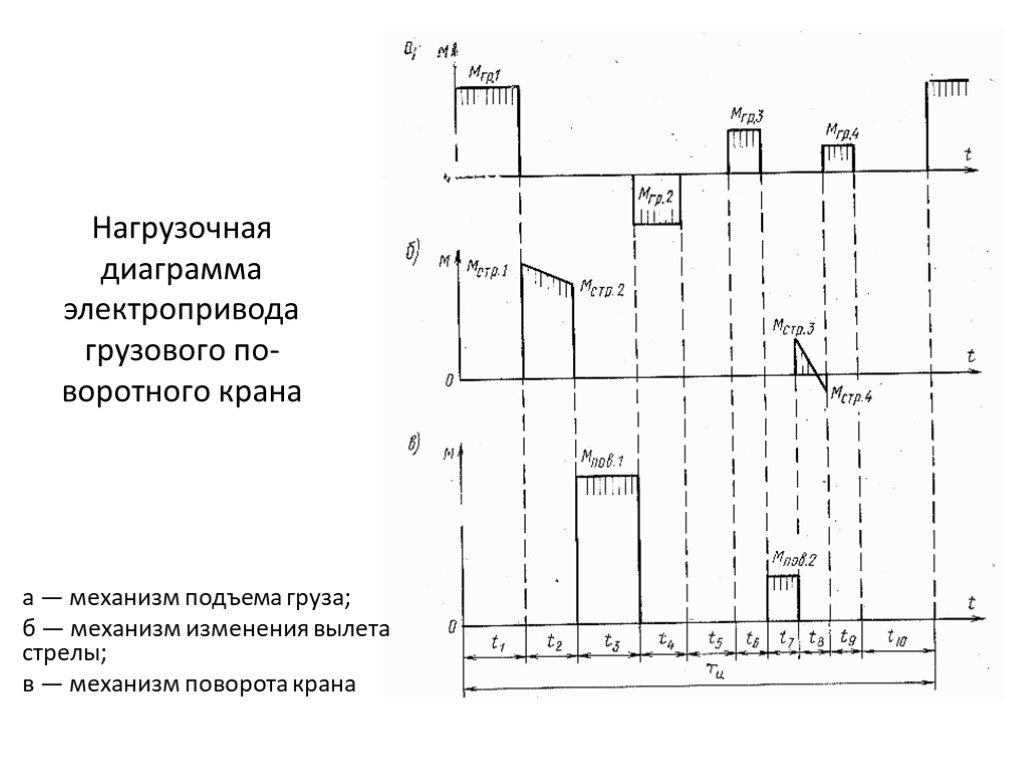 Слайд 11
Слайд 11 Слайд 12
Слайд 12 Слайд 13
Слайд 13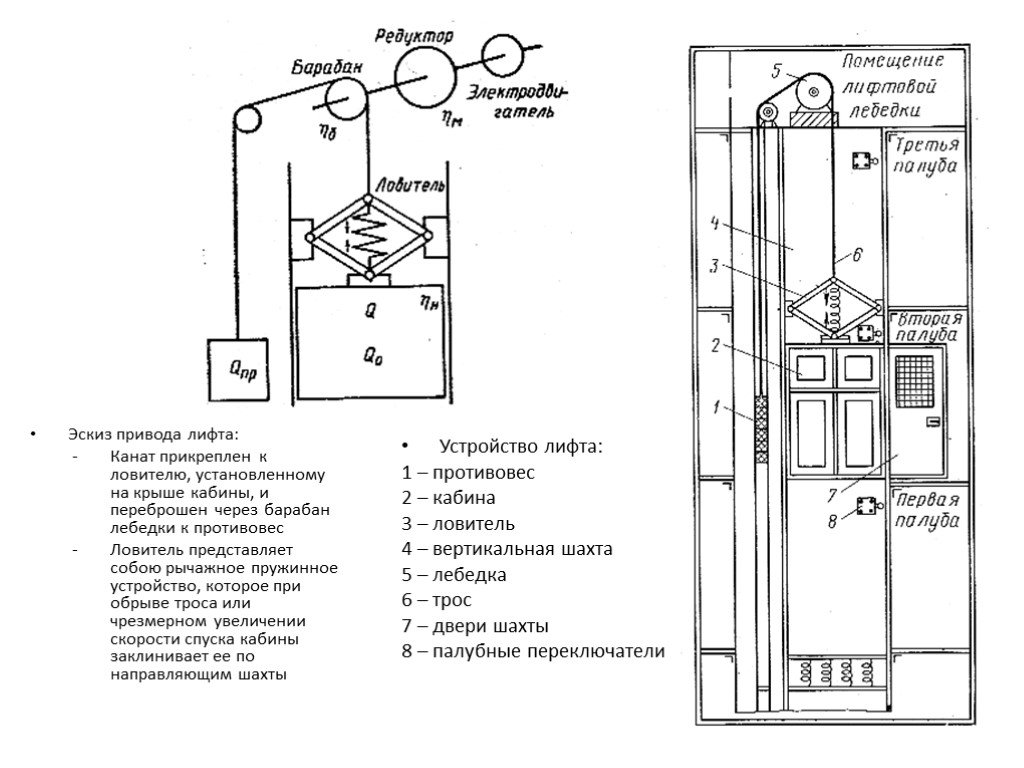 Слайд 14
Слайд 14 Слайд 15
Слайд 15 Слайд 16
Слайд 16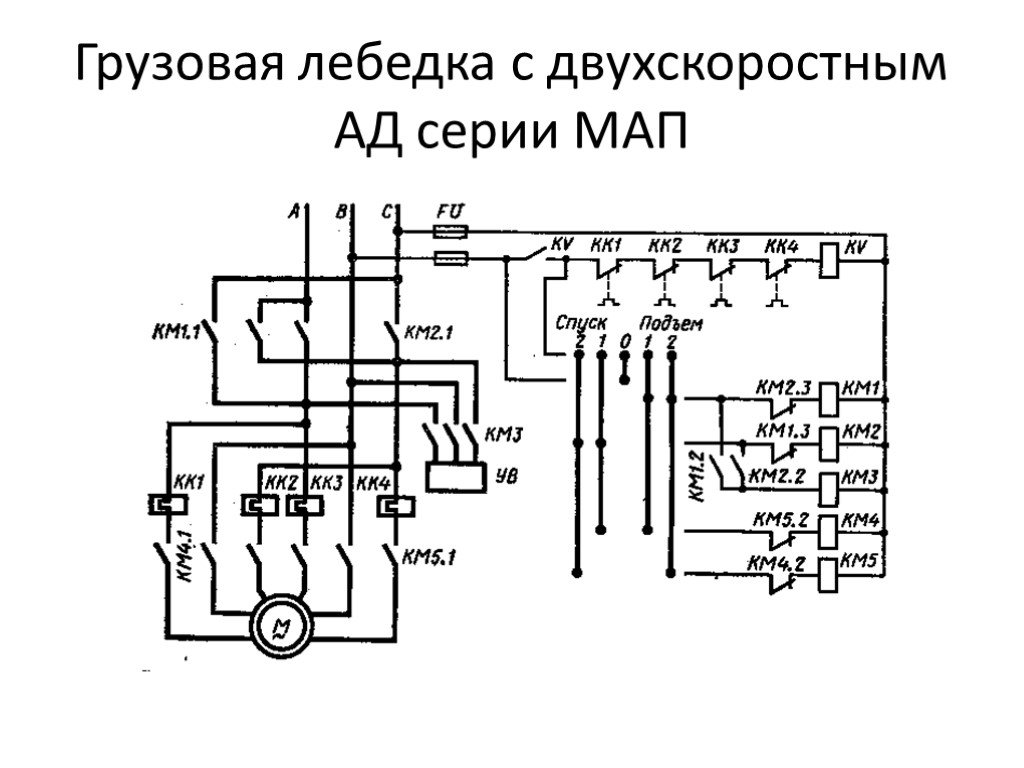 Слайд 17
Слайд 17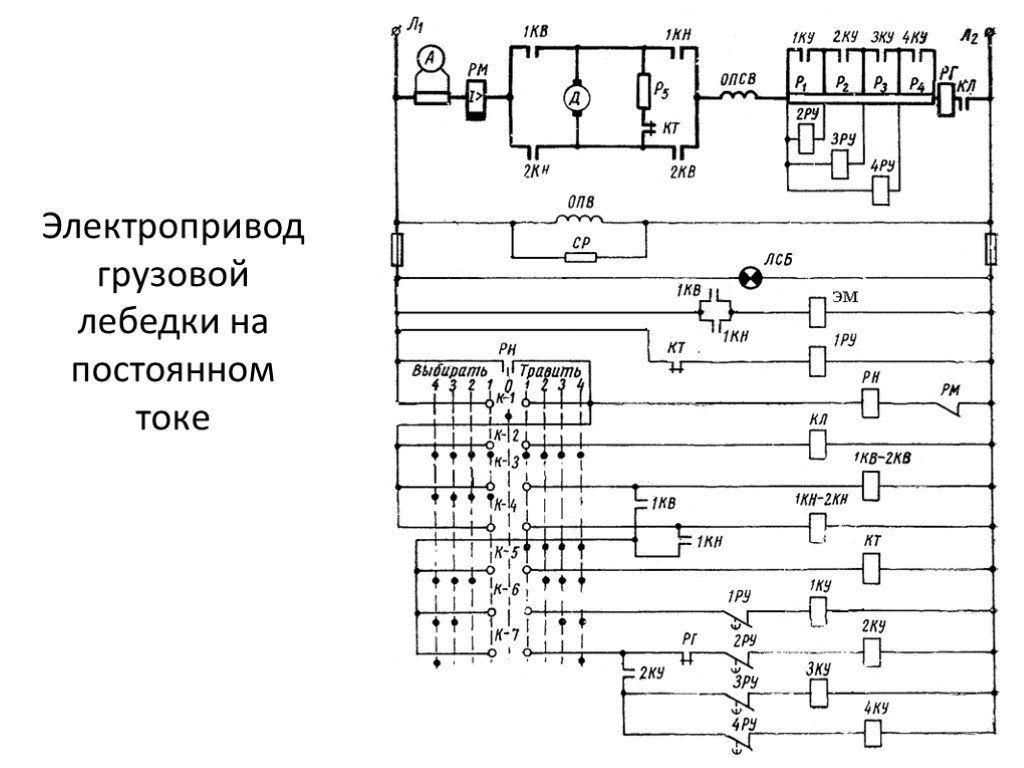 Слайд 18
Слайд 18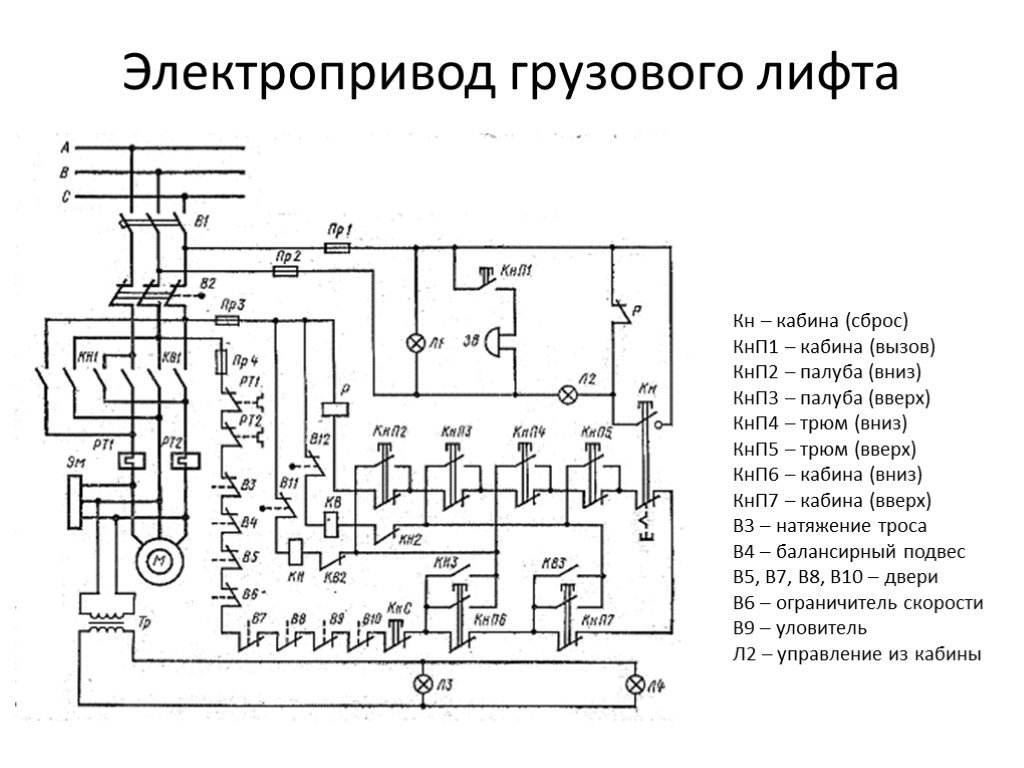 Слайд 19
Слайд 19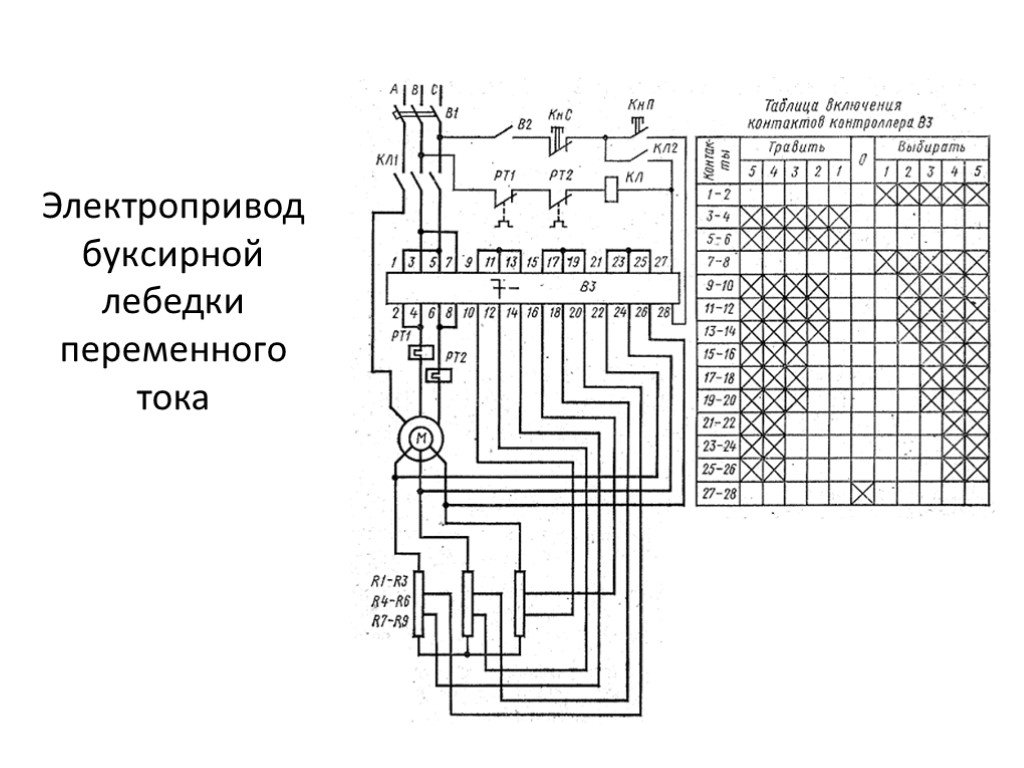 Слайд 20
Слайд 20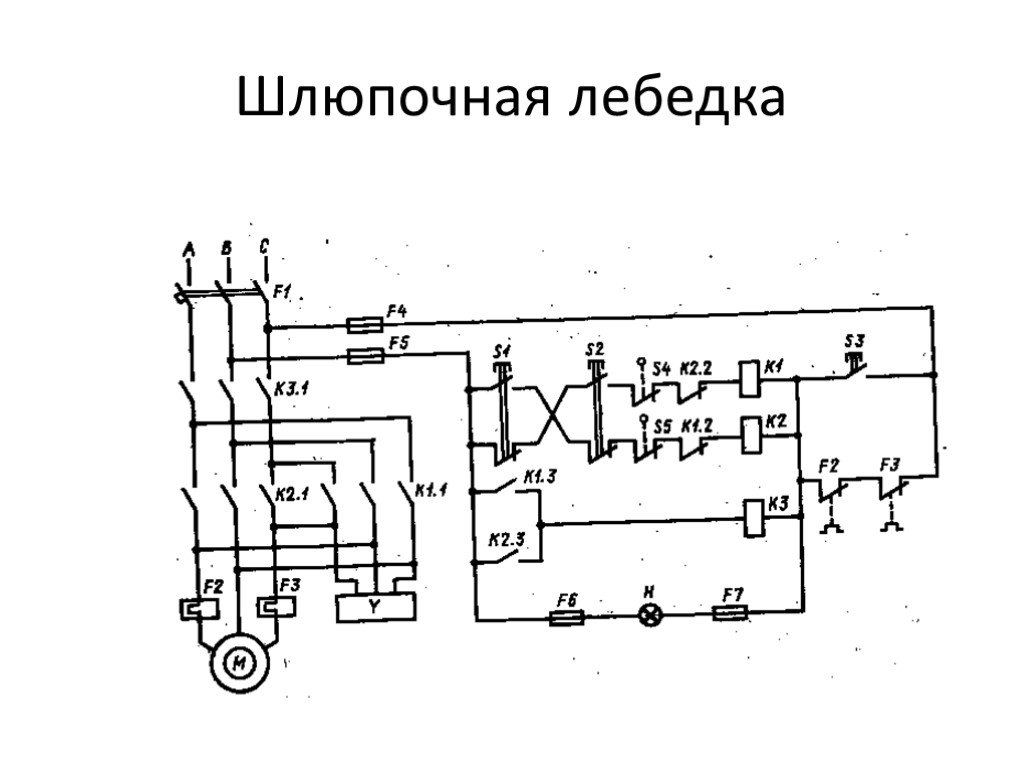 Слайд 21
Слайд 21








