Слайд 1МАШИНЫ ПОСТОЯННОГО ТОКА
Слайд 2Конструкция машин постоянного тока
Конструкция машины постоянного тока: 1 – вал, 2 – задний подшипниковый щит, 3 – коллектор, 4 – щетки, 5 – якорь, 6 – главные полюсы, 7 – обмотка возбуждения, 8 – станина, 9 – передний подшипниковый щит, 10 – вентилятор, 11 – лапы, 12 - подшипники
Слайд 3Крепление главных полюсов машины постоянного тока с помощью болтов, ввернутых в полюс (а), и с помощью болтов, ввернутых в массивный стержень (б): 1 – полюсный наконечник, 2 – сердечник полюса, 3 - болт, 4 – заклепка, 5 – катушка обмотки возбуждения, 6 – массивный стержень, 7 – крайние листы полюса
Слайд 4Конструкция могопакетного сердечника якоря: 1 – пакет сердечника, 2 – радиальный вентиляционный канал, 3 – бандаж лобовой части обмотки якоря, 4 – пластина коллектора
Слайд 5Медная (а) и изоляционная (б) пластины коллектора: 1 – выступ (петушок) коллекторной пластины
Слайд 6Устройство коллекторов на стальной втулке (а) и на пластмассе (б): 1 – стальная втулка, 2 – миканитовые изоляционные манжеты, 3 - коллекторные пластины, 4 –нажимной фланец, 5 - контргайка, 6 - пластмасса, 7 - стальные бандажи
Слайд 7Устройство щеткодержателей с радиальным (а) и наклонным (б) расположением щеток: 1 – щеткодержатель, 2 – щетка, 3 – пружина, 4 – электрический вывод, 5 - колодки
Слайд 8Лист неявнополюсного шихтованного магнитопровода статора с распределенными обмотками: 1 – пазы для обмотки возбуждения и компенсационной обмотки, 2 – пазы для обмотки дополнительных полюсов
Слайд 9Принцип работы
Принципиальная схема машины постоянного тока с кольцевой обмоткой якоря
Слайд 10Электрическая схема якорной цепи
Слайд 11Если машина работает в режиме двигателя, то к щеткам подводится постоянный ток. Коллектор в этом случае преобразует постоянный ток внешней сети в переменный ток, протекающий по обмотке якоря, т.е. является инвертором.
Если машина работает в режиме генератора, то переменная ЭДС обмотки выпрямляется с помощью коллектора, т.е. коллектор является выпрямителем.
Слайд 12ЭДС обмотки якоря и электромагнитный момент
При холостом ходе машины, когда ток в якоре Iа равен нулю, магнитный поток создается только обмоткой возбуждения. Поскольку воздушный зазор между якорем и полюсным наконечником мал, то бóльшая часть потока будет замыкаться под полюсным наконечником.
В этом случае магнитная индукция под полюсным наконечником постоянна, а в межполюсном пространстве она будет резко уменьшаться и на геометрической нейтрали (поперечная ось q) будет равна нулю.
Слайд 13Распределение магнитного поля в воздушном зазоре машины постоянного тока при холостом ходе: 1 – реальное распределение индукции, 2 – среднее значение индукции
Слайд 14Пусть i-й проводник обмотки якоря (всего в обмотке якоря N последовательно соединенных проводников) имеет активную длину l и вращается в магнитном поле с окружной скоростью va. Тогда наводимая в нем ЭДС будет равна ei = Bilva
Слайд 15ЭДС машины Е равна ЭДС параллельной ветви, в которой расположены N/(2a) последовательно соединенных проводника. Предполагая, что обмотка имеет диаметральный шаг y1 = , получим
Заменим реальное распределение магнитной индукции (кривая 1) прямой 2, параллельной оси абсцисс и имеющей ординату Вср, равную
Слайд 16Если представить линейную скорость va в виде va = Daω/2π = 2p ω/2π и учесть, что магнитный поток полюса Ф = Bср l, то ЭДС машины можно записать в виде: E = pN/(2πa) ωФ , E = cωФ
Слайд 17При нагрузке машины по проводникам обмотки якоря протекает ток параллельной ветви ia = i/(2a), где i — сетевой ток машины. При взаимодействии тока ia с магнитным полем возникает электромагнитная сила. При установке щеток на поперечной оси на все N проводников обмотки якоря эти силы будут действовать в одну сторону. Тогда сила, действующая на i-й проводник, и развиваемый ей момент будут равны fi = Biial , mi = Σ fiDa
Слайд 18Так как длина l всех проводников одинакова и через них протекает один и тот же ток ia, то электромагнитный момент, развиваемый машиной, будет равен
M = (pN / 2a) iaФ = ciaФ = c’iФ
Слайд 19Реакция якоря
Поле возбуждения (а) и поле якоря (б) при установке щеток на геометрической нейтрали
Слайд 20Для того чтобы определить характер распределения поля в воздушном зазоре машины при нагрузке, найдем распределение МДС и индукции поперечного поля якоря. При расчетах обычно делают допущение, что проводники обмотки якоря равномерно распределены по его окружности. Через каждый из N проводников обмотки якоря протекает ток параллельной ветви ia = i/(2а). Тогда линейная нагрузка якоря A равна A = iaN/(Da)
Слайд 21Распределение результирующего магнитного поля машины постоянного тока при нагрузке
Слайд 22Развернутые в линию статор и якорь (а) и распределение МДС якоря (б) вдоль воздушного зазора
Слайд 23Полный ток в пределах, охватываемых этой линией, равен 2xА = 2Fqx , где Fqx ‑ поперечная МДС якоря на один воздушный зазор. При x = 0 ‑ Fqx = 0. С увеличением х поперечная МДС якоря возрастает, достигая максимального значения Fqmax на геометрической нейтрали (при x = /2): Fqmax = A/2
Слайд 24При x > /2 МДС Fqx уменьшается, так как линия поля будет охватывать часть проводников с противоположным направлением тока. Поперечную МДС якоря Fqx можно представить в виде двух составляющих, одна из которых (Fx) равна магнитному напряжению воздушного зазора x, а другая (F/стx) - сумме магнитных напряжений ферромагнитных участков магнитной цепи:
Fqx = Fx + Fстx
Слайд 25Реакция якоря по поперечной оси
Распределение поперечного поля якоря в воздушном зазоре
Слайд 26В машине с ненасыщенной магнитной системой распределение результирующего магнитного поля в зазоре машины при нагрузке можно получить, применив принцип наложения, т. е. путем суммирования в каждой точке х кривых распределения индукции поперечного поля якоря Bqx и распределения индукции поля возбуждения B0x. В итоге получится кривая распределения результирующего магнитного поля в воздушном зазоре Вx(нг).
Слайд 27Размагничивающее действие реакции якоря
Полюсное деление машины (а), распределение поля возбуждения (б), поля якоря (в) и результирующего поля (г) в воздушном зазоре
Слайд 28Разложение МДС якоря при щетках, установленных не на геометрической нейтрали: а – распределение тока в проводниках обмотки, б – образование поперечной МДС Fq, в – образование продольной МДС Fd
Слайд 29Физические основы коммутации
При вращении якоря коллекторные пластины поочередно входят в соприкосновение со щеткой. При этом секции, присоединенные к этим пластинам, замыкаются щеткой накоротко, а при дальнейшем перемещении якоря переходят в другую параллельную ветвь обмотки . При переходе секции из одной параллельной ветви в другую ток в ней меняет направление на противоположное. Процесс переключения секции из одной параллельной ветви в другую носит название коммутации. Секция, накоротко замкнутая щеткой, называется коммутируемой секцией, а время, в течение которого происходит это замыкание, — периодом коммутации.
Слайд 30Переключение коммутируемой секции из одной параллельной ветви в другую
Слайд 31Период коммутации Тк (с) зависит от ширины щетки bщ и окружной скорости коллектора vк = Dкn / 60 = Kbкn / 60. Для простой петлевой обмотки справедливо Тк = bщ /vк = 60щ/(Kn)
Слайд 32Коммутируемая секция простой петлевой обмотки
Слайд 33Расчетная схема для вывода закона изменения тока в коммутируемой секции: 1 – коммутируемая секция, 2 – 4 – коллекторные пластины
Слайд 34Улучшение коммутации путем увеличения сопротивления коммутируемой секции. Сопротивление цепи коммутируемой секции состоит из сопротивления самой секции, сопротивления выводов секции, соединяющих ее с коллектором, и переходного сопротивления щеточного контакта. Сопротивления секции и выводов малы по сравнению с rш, а их увеличение приведет к росту электрических потерь и снижению КПД.
Слайд 35Улучшение коммутации путем уменьшения реактивной ЭДС. Этот метод в первую очередь относится к машинам, не имеющим дополнительных полюсов. Значение реактивной ЭДС может быть получено по формуле Пихельмайера: eр = 2wslAva
Слайд 36Улучшение коммутации путем создания коммутирующего поля в зоне коммутации. Наиболее целесообразным способом улучшения коммутации является компенсация реактивной ЭДС. Для этого в зоне, где располагаются проводники коммутируемых секций, необходимо создать такое магнитное поле, чтобы ЭДС вращения имела направление, противоположное направлению реактивной ЭДС и была бы равна или несколько превышала ее. Если ер — ек = 0, то в машине будет прямолинейная коммутация, а если ер — ек < 0, то коммутация будет носить ускоренный характер. Для того чтобы получить оптимальную ускоренную коммутацию, следует увеличить ЭДС eк принять ее равной eк = (1,1 ‑ 1,15) eр.
Слайд 37Создание коммутирующего поля с помощью дополнительных полюсов является наилучшим способом улучшения коммутации в машинах постоянного тока. В настоящее время дополнительные полюсы применяются во всех машинах мощностью 1 кВт и выше.
Слайд 38Схема установки дополнительных полюсов
Слайд 39Создание коммутирующего поля путем сдвига щеток. Сдвиг щеток с геометрической нейтрали для получения коммутирующего поля применяется в машинах, не имеющих дополнительных полюсов. Щетки сдвигаются с нейтрали таким образом, чтобы коммутируемые секции располагались за физической нейтралью, в зоне, где имеется поле главных полюсов. Щетки следует сдвигать с геометрической нейтрали по направлению вращения якоря у генераторов и против направления вращения — у двигателей.
Слайд 40Схема включения обмотки дополнительных полюсов (ОДП) и конденсаторов для уменьшения радиопомех
Слайд 41Генераторы постоянного тока
Классификация генераторов постоянного тока производится по способу их возбуждения. Они подразделяются на генераторы с независимым возбуждением и с самовозбуждением. Генераторы первого типа выполняются с электромагнитным или магнитоэлектрическим возбуждением. В генераторах с электромагнитным возбуждением обмотка возбуждения, расположенная на главных полюсах, подключается к независимому источнику питания.
Слайд 42Электрические схемы генераторов постоянного тока с электромагнитным возбуждением: а ‑ независимое возбуждение, б ‑ параллельное возбуждение, в ‑ последовательное возбуждение, г ‑ смешанное возбуждение; ОДП ‑ обмотка добавочных полюсов, ОВ ‑ обмотка возбуждения, ОВС ‑ обмотка последовательного возбуждения (сериесная), ОВШ ‑ обмотка параллельного возбуждения (шунтовая)
Слайд 43Уравнение равновесия напряжений для цепи якоря. Для режима генератора уравнение цепи якоря имеет вид U = E - Ia ra - Uщ
Уравнение равновесия напряжений для цепи возбуждения. Для обмотки независимого напряжения справедливо Uв = Iв rв
Для генераторов параллельного и смешанного возбуждения справедливо U = Iв rв
Слайд 44Уравнение баланса токов (для генераторов параллельного и смешанного возбуждения) Ia = Iв + I
Рабочие свойства электрических машин определяются их характеристиками. Для генераторов постоянного тока основными являются характеристика холостого хода, нагрузочная, внешняя и регулировочная характеристики.
Слайд 45Нагрузочная характеристика представляет собой зависимость напряжения генератора от тока возбуждения U = f(Iв) при неизменном токе якоря Ia = const. Практическое значение этой характеристики заключается в возможности определить по ней размагничивающее действие реакции якоря и определить зависимость реакции якоря от насыщения магнитной цепи и тока якоря.
Слайд 46Характеристика холостого хода (1) и нагрузочная характеристика (2) генератора независимого возбуждения
Слайд 47Внешняя характеристика представляет собой зависимость напряжения генератора от тока нагрузки U = f(I) при постоянном токе возбуждения Iв = const (для генератора с независимым возбуждением) или при постоянном сопротивлении цепи обмотки возбуждения rв = const (для генераторов с самовозбуждением).
Слайд 48Внешние характеристики генератора постоянного тока с независимым (1), параллельным (2), смешанным согласным (3) и смешанным встречным (4) возбуждением
Слайд 49Внешняя характеристика генератора параллельного возбуждения
Слайд 50Регулировочная характеристика представляет зависимость тока возбуждения генератора от его тока нагрузки Iв = f(I) при неизменном напряжении U = Uном. Ее обычно снимают при увеличении нагрузки (первая точка характеристики соответствует режиму холостого хода, когда I = 0).
Слайд 51Регулировочные характеристики генератора постоянного тока с независимым (1), параллельным (2), смешанным согласным (3) и смешанным встречным (4) возбуждением
Слайд 52Условия самовозбуждения ГПТ с параллельным и смешанным возбуждением
Характеристика холостого хода (1) и характеристики цепи возбуждения (2 ‑ 4) при постоянной частоте вращения генератора
Слайд 53Характеристики холостого хода (1 ‑ 3) и характеристика цепи возбуждения (4) при переменной частоте вращения генератора
Слайд 54Для самовозбуждения генератора необходимо выполнение следующих условий: 1. В машине должен существовать остаточный магнитный поток. 2. Поток возбуждения должен быть направлен согласно с остаточным потоком. 3. Сопротивление цепи обмотки возбуждения должно быть меньше критического или частота вращения якоря должна быть больше критической.
Слайд 55Классификация двигателей постоянного тока
Как и генераторы, двигатели постоянного тока классифицируются по способу включения обмотки возбуждения. Различают двигатели независимого, параллельного, последовательного и смешанного возбуждения. Электрические схемы этих двигателей имеют такой же вид, как и схемы соответствующих генераторов. Отличие заключается в том, что ток якоря Ia в двигателях независимого и последовательного возбуждения равен току сетевому току I, а в двигателях параллельного и смешанного возбуждения из сети потребляется и ток возбуждения Iв.
Слайд 56Основные уравнения
Уравнение равновесия напряжений для цепи якоря. Для режима двигателя уравнение цепи якоря имеет вид: U = E + Ia ra + Uщ
Упрощение уравнения производится также, как в генераторах
U = E + IaRa
Уравнения равновесия напряжений для цепи возбуждения не отличаются от аналогичных уравнений для генератора.
Слайд 57Уравнение баланса токов (для двигателей параллельного и смешанного возбуждения):
I = Ia + Iв
Уравнение движения J. d/dt = M – Mс
Уравнение частоты вращения двигателя
ω = (U –IaRa)/cФ или n = (30/π) ω = c1 (U – IaRa)/Ф.
Слайд 58Условия устойчивой работы двигателей постоянного тока
Анализ устойчивости работы двигателя постоянного тока
Слайд 59Способы и условия пуска двигателей постоянного тока
При пуске двигателя (n = 0) ЭДС, наводимая в обмотке якоря, равна нулю, а ток равен Iaп = U/Ra
Поскольку сопротивление цепи якоря Ra невелико, то при пуске с номинальным напряжением (U = Uном) ток якоря в 10 — 50 раз будет превышать номинальное значение. Такой ток недопустим ни для щеток, ни для обмоток, ни для сети.
Слайд 60Кроме того, поскольку пропорционально росту тока возрастает электромагнитный момент двигателя, то большой момент может привести к поломке узла, соединяющего вал двигателя и приводимого механизма. По допустимым условиям работы коллекторно-щеточного узла пусковой ток ограничен ‑ Iaп (2 ‑ 2,5) Iaном.
Слайд 61Поэтому прямой пуск (прямое включение в сеть) допускается только для двигателей малой мощности с относительно большим сопротивлением цепи якоря. Для более мощных двигателей необходимо уменьшать пусковой ток до указанных выше значений. Достигнуть этого можно или снижением подводимого напряжения, или включением последовательно с обмоткой якоря добавочного активного сопротивления (пускового реостата).
Слайд 62Пуск при пониженном напряжении можно осуществить, если двигатель подключен к отдельному регулируемому источнику постоянного тока. В этом случае напряжение источника при включении двигателя плавно увеличивают, что позволяет избежать больших толчков тока. Начальное напряжение при пуске выбирается так, чтобы в первый момент пуска (n = 0) ток в цепи якоря Iaп (2 ‑ 2,5) Iaном.
Слайд 63Пуск с помощью пускового реостата. Максимальное значение сопротивления пускового реостата выбирается так, чтобы в первый момент пуска (n = 0) ток в цепи якоря Iaп (2 ‑ 2,5) Iaном. По мере разгона двигателя растет наводимая в его обмотке ЭДС, вследствие чего ток якоря будет уменьшаться. Поэтому по мере разгона двигателя сопротивление пускового реостата постепенно уменьшают, а когда частота вращения достигнет установившегося значения — выводят полностью (Rп = 0), поскольку пусковые реостаты по условиям охлаждения рассчитаны на кратковременное протекание тока.
Слайд 64Условия пуска двигателей независимого, параллельного и смешанного возбуждения.
Первым условием является ограничение пускового тока одним из двух рассмотренных способов.
Слайд 65Второе условие вытекает из требования минимального времени пуска. Для этого, как следует из уравнения движения, необходимо максимизировать пусковой момент. Увеличить пусковой момент Mп при ограниченном значении тока Iaп можно только за счет увеличения магнитного потока Ф. Поэтому вторым условием пуска является требование пуска при максимальном токе возбуждения. Для этого при пуске обмотку возбуждения включают на полное напряжение сети и полностью выводят регулировочный реостат Rв.
Слайд 66Схема включения пускового реостата РП для пуска двигателя параллельного возбуждения: Я, Ш, Л – выводы пускового реостата для подключения обмоток якоря и возбуждения, а также сети (линии)
Слайд 67Условия пуска двигателя последовательного возбуждения.
Второе условие пуска ‑ запрещение пуска двигателя без нагрузки. Обычно пуск можно проводить, если Mc (20 ‑ 30)% Mном.
Слайд 68Способы регулирования скорости двигателей постоянного тока
n = c1 (U - IaRa)/ Ф,
Частота вращения равна
откуда следует, что ее можно регулировать тремя способами: изменением напряжения якоря U, изменением сопротивления цепи якоря Ra, изменением потока возбуждения Ф.
Слайд 691.Регулирование частоты вращения изменением подводимого напряжения. Регулирования скорости полагают неизменными сопротивление цепи якоря и ток возбуждения. В этом случае частота вращения двигателей постоянного тока примерно пропорциональна приложенному напряжению U. Поскольку работа двигателя при U > Uном обычно недопустима по потенциальным условиям работы коллектора, то данный способ позволяет регулировать частоту вращения вниз от частоты вращения, соответствующей естественной характеристике.
Слайд 70Скоростные и механические характеристики двигателя при плавном изменении напряжения, подводимого к цепи якоря
Слайд 71Частным случаем регулирования изменением напряжения является импульсное регулирование напряжения. В этом случае постоянное по значению и направлению напряжение периодически подается на якорь в виде отдельных импульсов .При таком питании среднее значение напряжения на якоре, которое определяет частоту вращения двигателя, равно Uср = (tи/Tц)U = U
Слайд 72Импульсное регулирование напряжения
Слайд 73Ток якоря при импульсном регулировании напряжения
Слайд 742.Регулирование частоты вращения путем изменения сопротивления цепи якоря. При рассмотрении этого способа регулирования полагают неизменными ток возбуждения Iв двигателя и напряжение сети U. Для изменения сопротивления Ra в цепь якоря последовательно включают регулировочный реостат Raд. При одном и том же токе якоря Ia и, следовательно, электромагнитного момента M это приводит к уменьшению частоты вращения двигателя (чем больше сопротивление Raд, тем меньше скорость).
Слайд 75Схема включения регулировочного реостата Raд в цепь якоря
Слайд 76Механические (скоростные) характеристики при изменении сопротивления цепи якоря
Слайд 773.Регулирование частоты вращения изменением магнитного потока. При рассмотрении этого способа регулирования полагают неизменными сопротивление и напряжение цепи якоря. Регулирование магнитного потока осуществляется изменением тока возбуждения двигателя. Так как в номинальном режиме (на естественной характеристике) магнитная цепь двигателя рассчитывается на работу почти с наибольшими значениями магнитного потока (на колене кривой характеристики холостого хода), то увеличение тока возбуждения не приводит к заметному увеличению потока. Поэтому поток изменяют в сторону уменьшения от расчетного значения путем уменьшения тока возбуждения.
Слайд 78Скоростные характеристики двигателей независимого (параллельного) возбуждения при изменении тока возбуждения
Слайд 79Механические характеристики двигателей независимого (параллельного) возбуждения при изменении тока возбуждения
Слайд 80Способы реверса и торможения двигателей постоянного тока
Схемы включения обмоток двигателя в рабочем режиме (а) и при реверсе путем изменения направления тока возбуждения (б) и полярности напряжения, подводимого к цепи якоря (в)
Слайд 81Схема динамического торможения (а) и механические ( скоростные) характеристики (б) двигателя параллельного (независимого) возбуждения
Слайд 82Схема (а) торможения противовключением и механические (скоростные) характеристики (б) двигателя параллельного (независимого) возбуждения
 Слайд 1
Слайд 1 Слайд 2
Слайд 2 Слайд 3
Слайд 3 Слайд 4
Слайд 4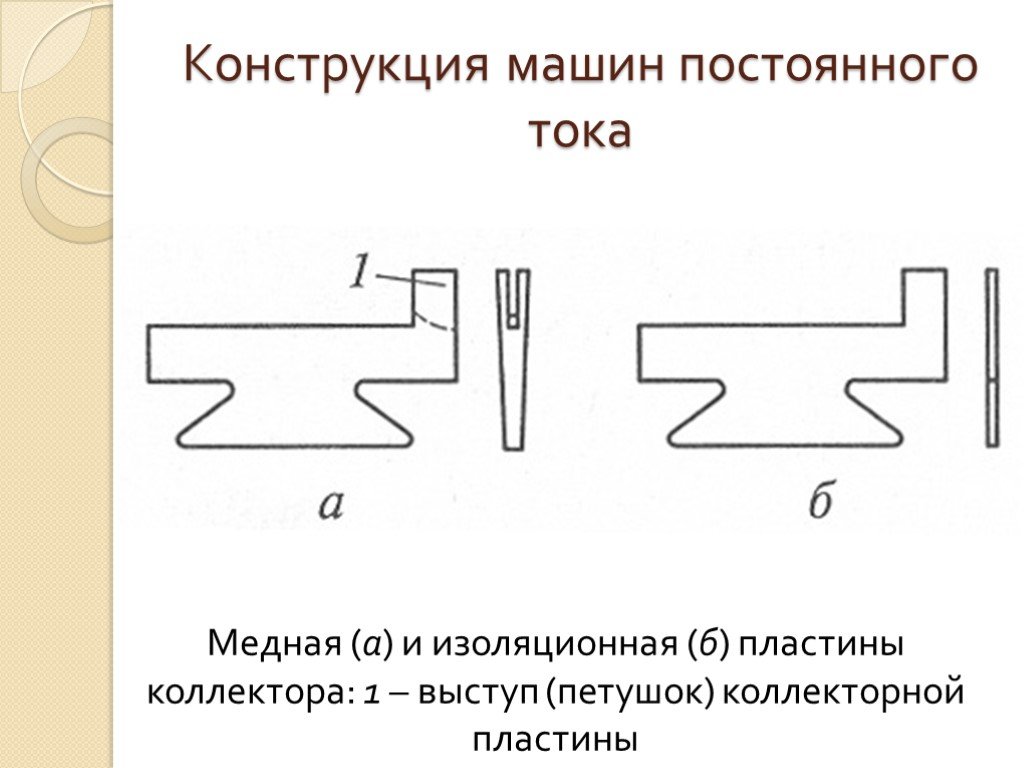 Слайд 5
Слайд 5 Слайд 6
Слайд 6 Слайд 7
Слайд 7 Слайд 8
Слайд 8 Слайд 9
Слайд 9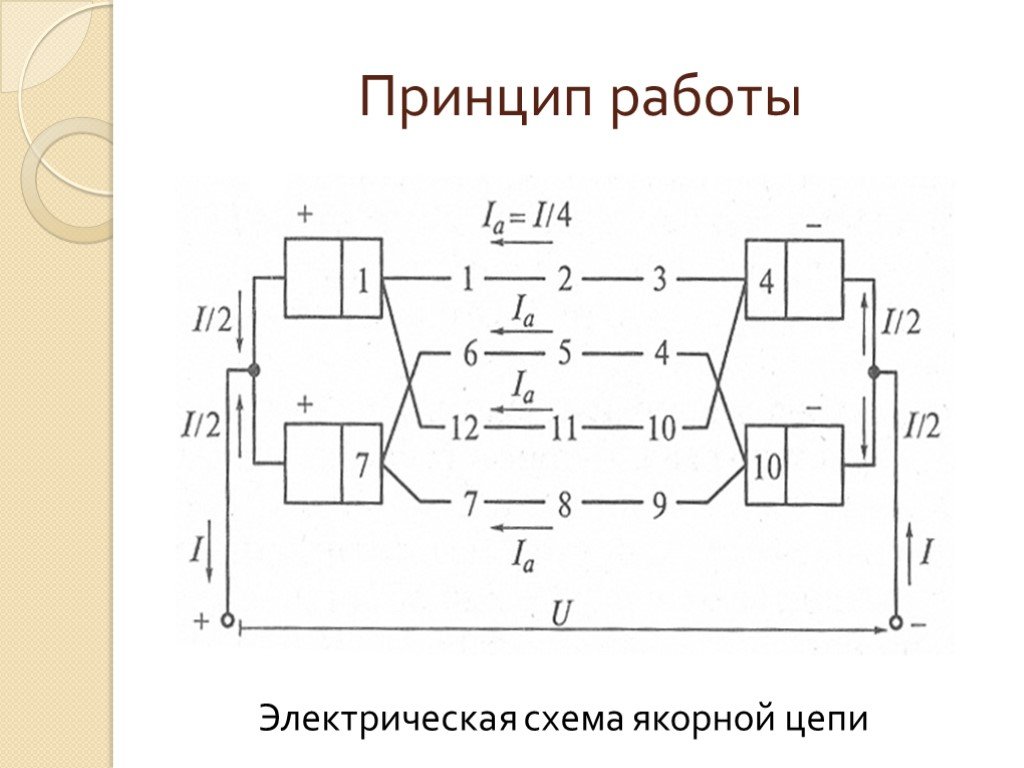 Слайд 10
Слайд 10 Слайд 11
Слайд 11 Слайд 12
Слайд 12 Слайд 13
Слайд 13 Слайд 14
Слайд 14 Слайд 15
Слайд 15 Слайд 16
Слайд 16 Слайд 17
Слайд 17 Слайд 18
Слайд 18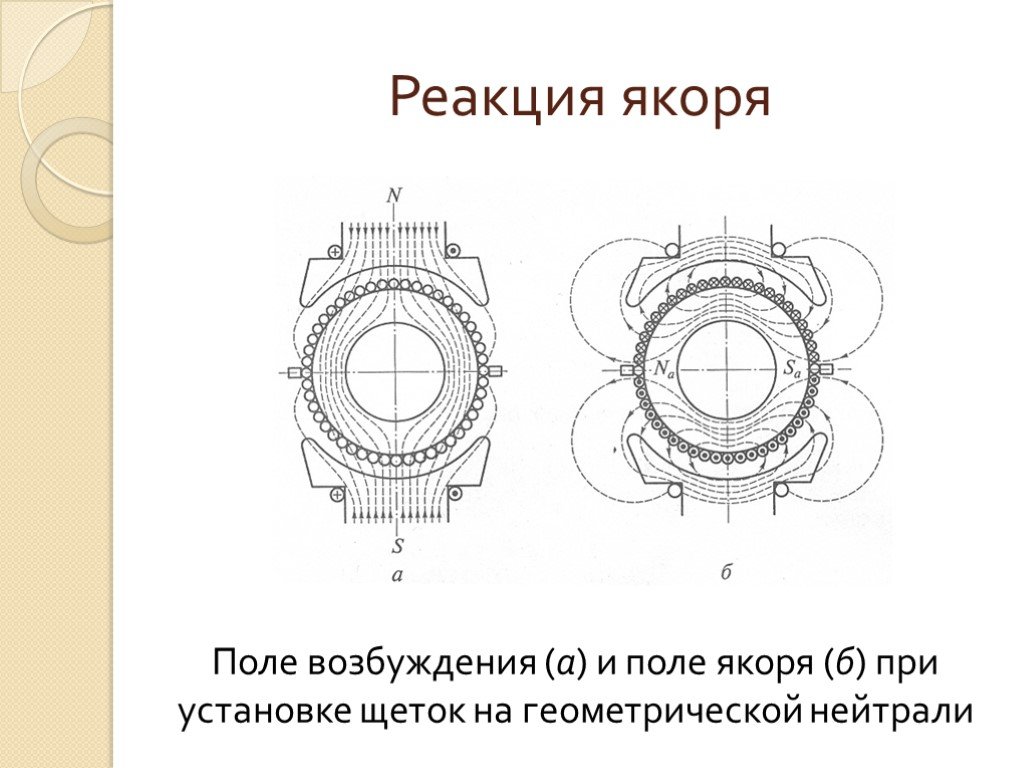 Слайд 19
Слайд 19 Слайд 20
Слайд 20 Слайд 21
Слайд 21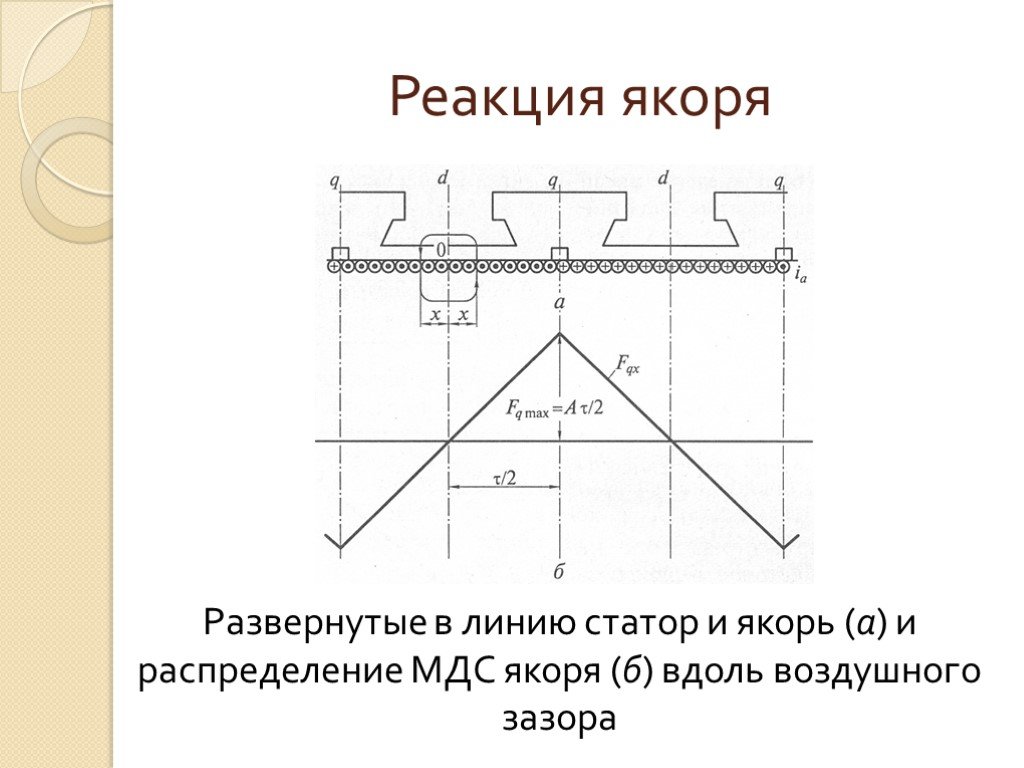 Слайд 22
Слайд 22 Слайд 23
Слайд 23 Слайд 24
Слайд 24 Слайд 25
Слайд 25 Слайд 26
Слайд 26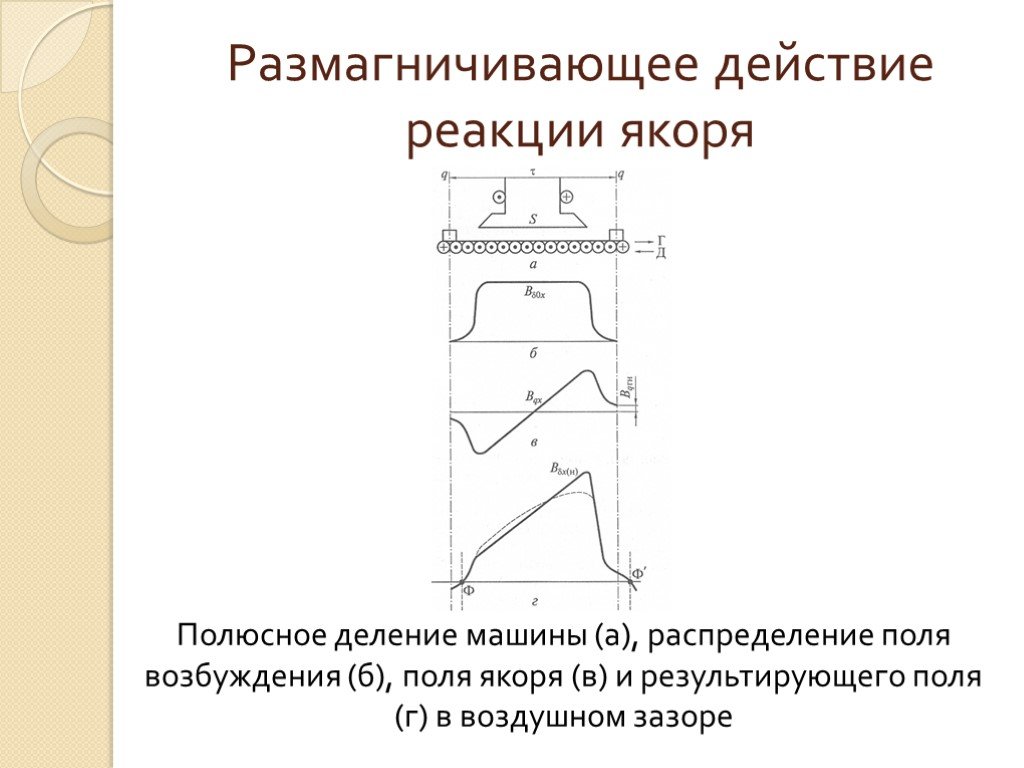 Слайд 27
Слайд 27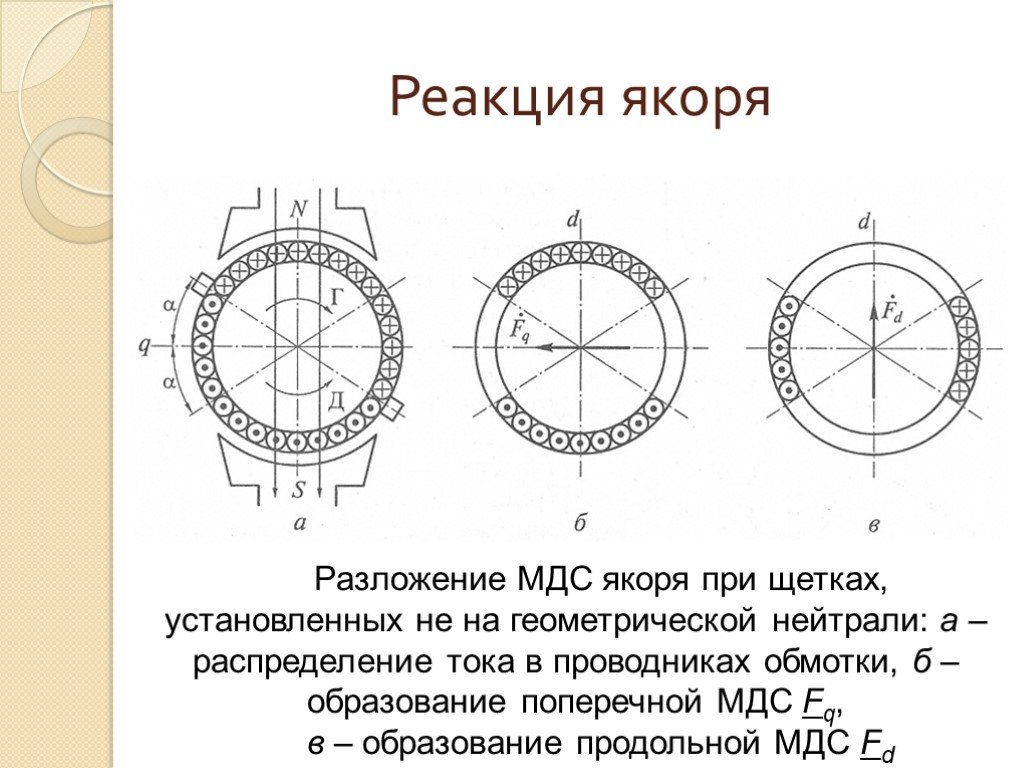 Слайд 28
Слайд 28 Слайд 29
Слайд 29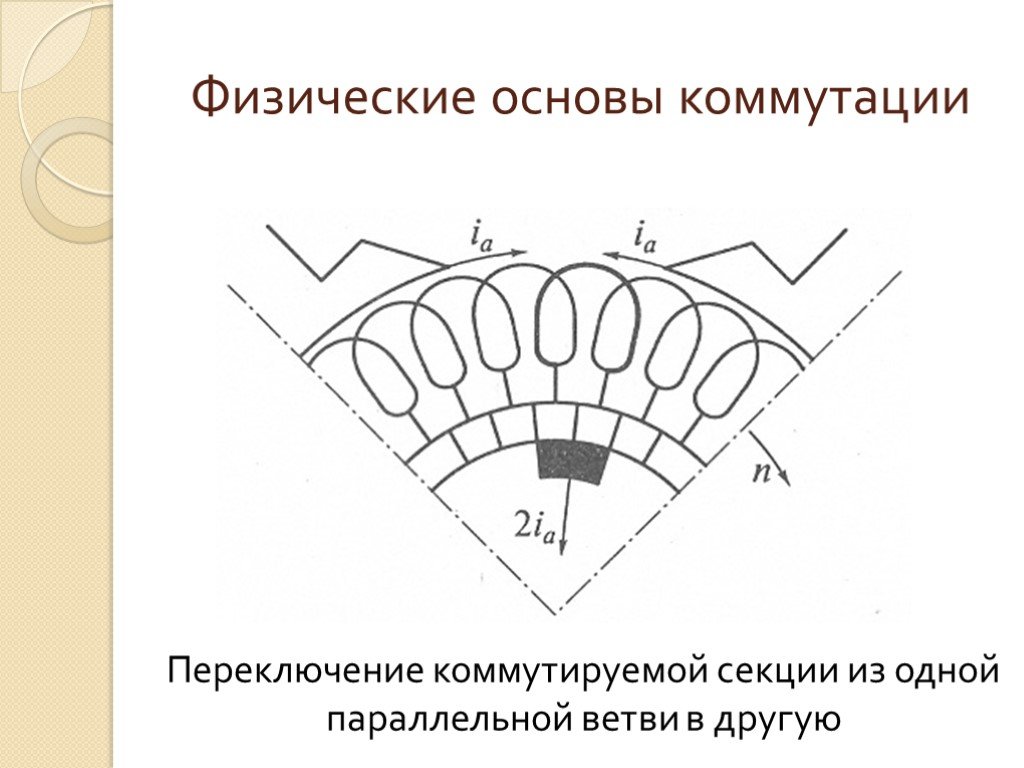 Слайд 30
Слайд 30 Слайд 31
Слайд 31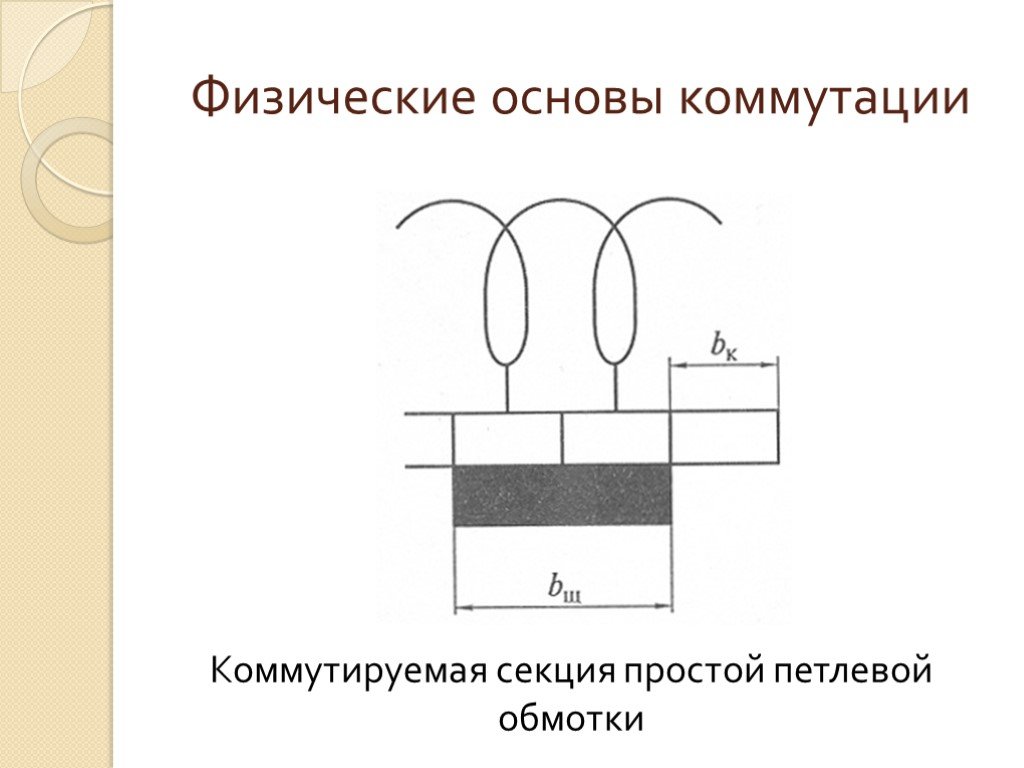 Слайд 32
Слайд 32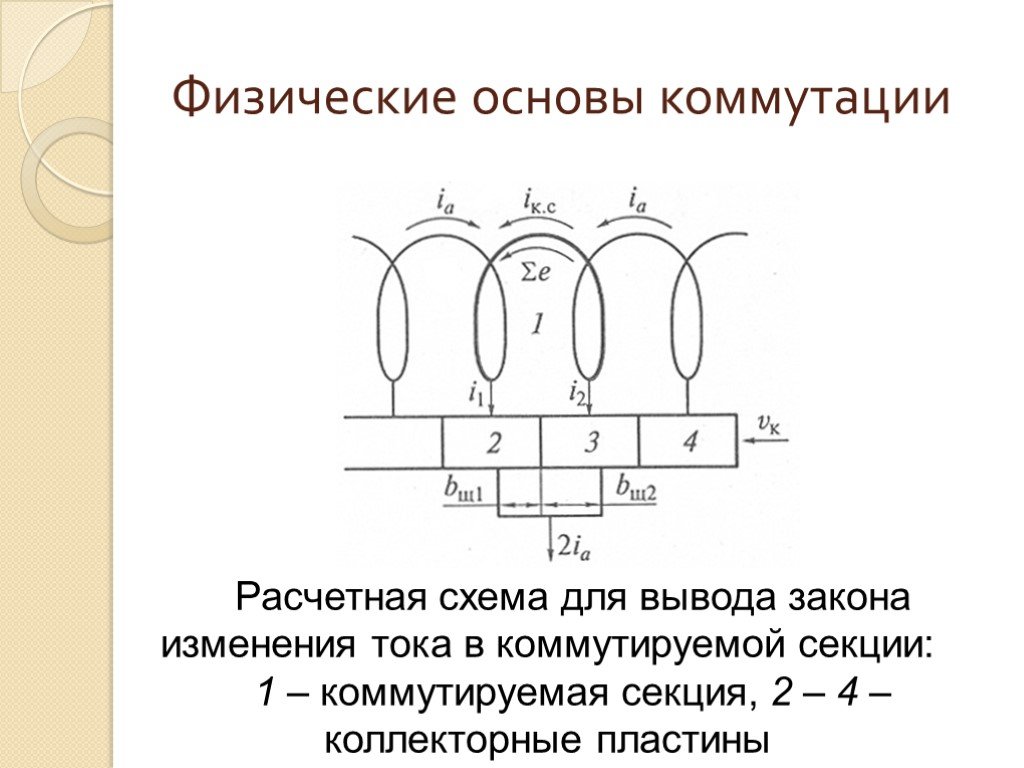 Слайд 33
Слайд 33 Слайд 34
Слайд 34 Слайд 35
Слайд 35 Слайд 36
Слайд 36 Слайд 37
Слайд 37 Слайд 38
Слайд 38 Слайд 39
Слайд 39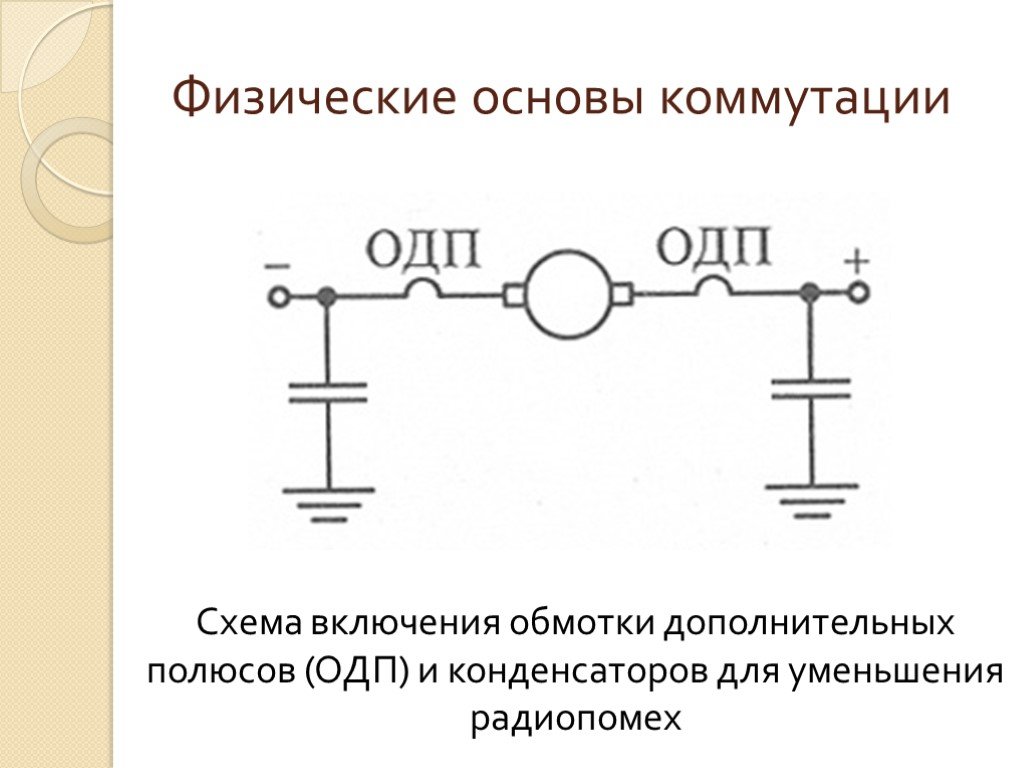 Слайд 40
Слайд 40 Слайд 41
Слайд 41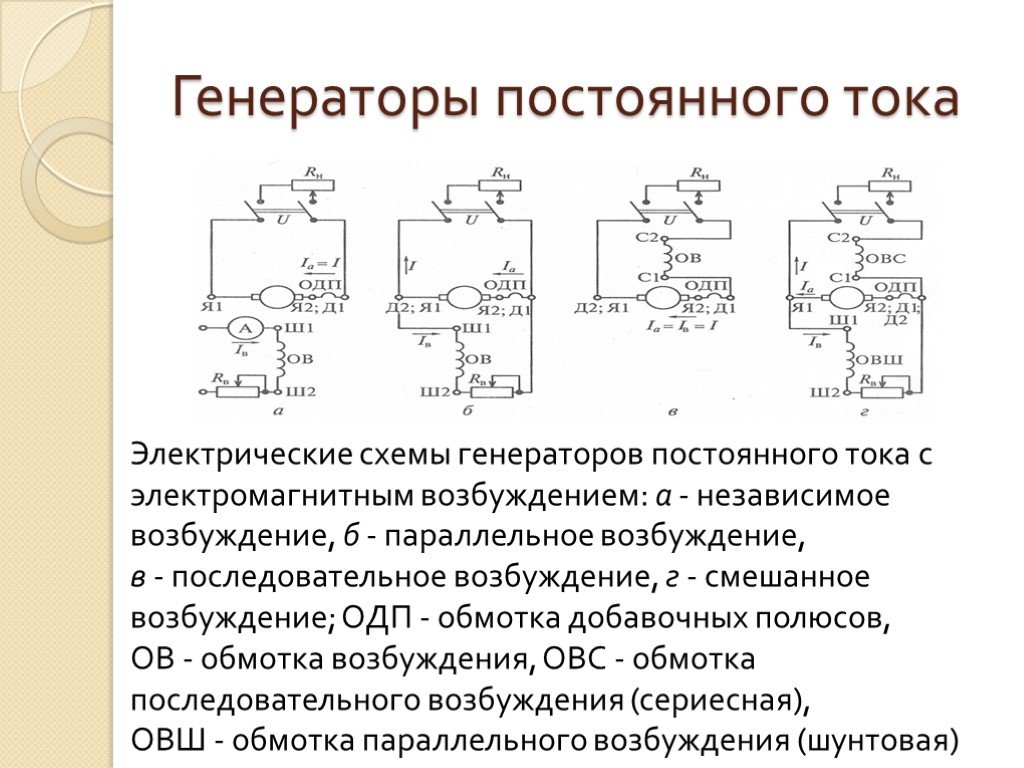 Слайд 42
Слайд 42 Слайд 43
Слайд 43 Слайд 44
Слайд 44 Слайд 45
Слайд 45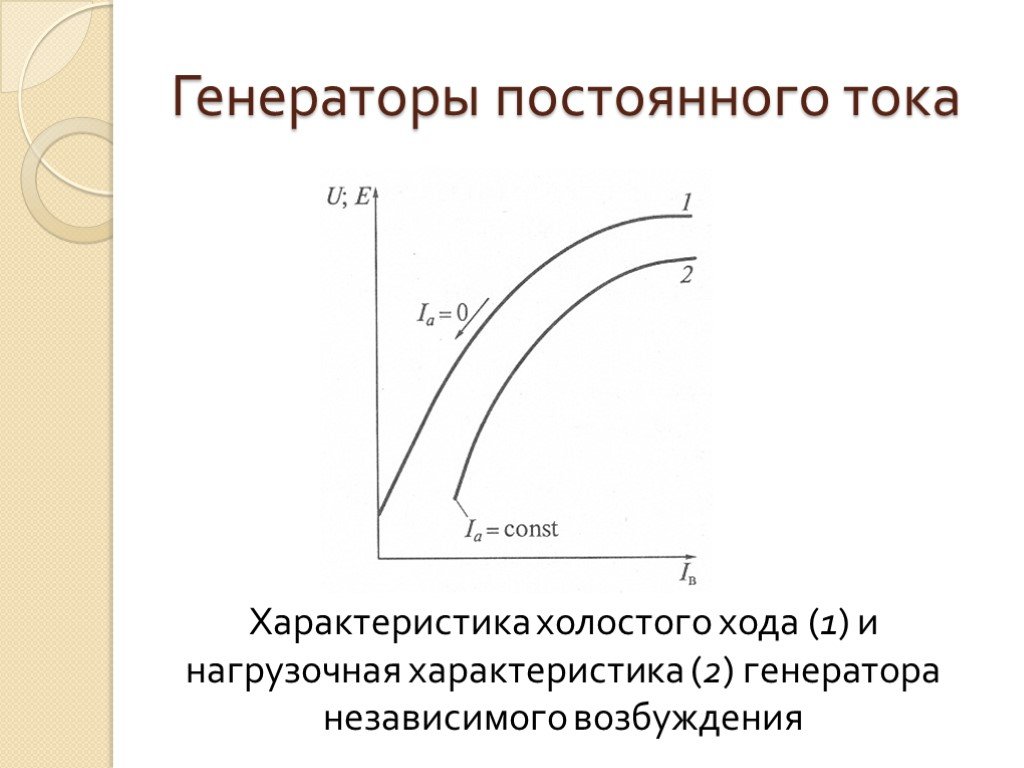 Слайд 46
Слайд 46 Слайд 47
Слайд 47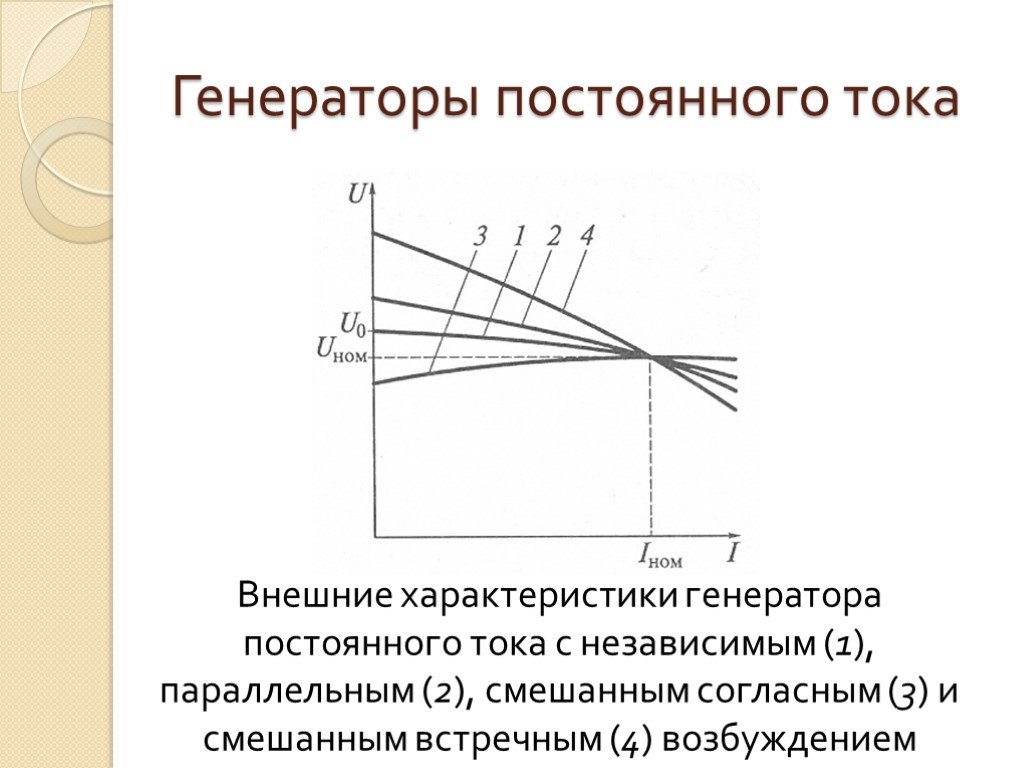 Слайд 48
Слайд 48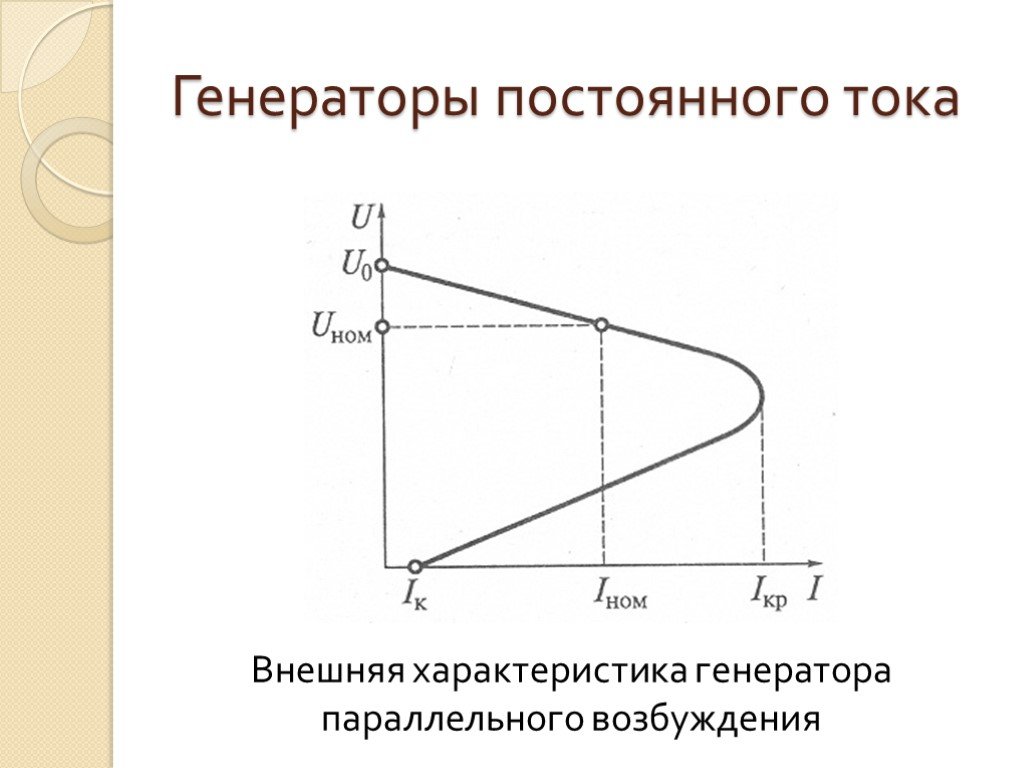 Слайд 49
Слайд 49 Слайд 50
Слайд 50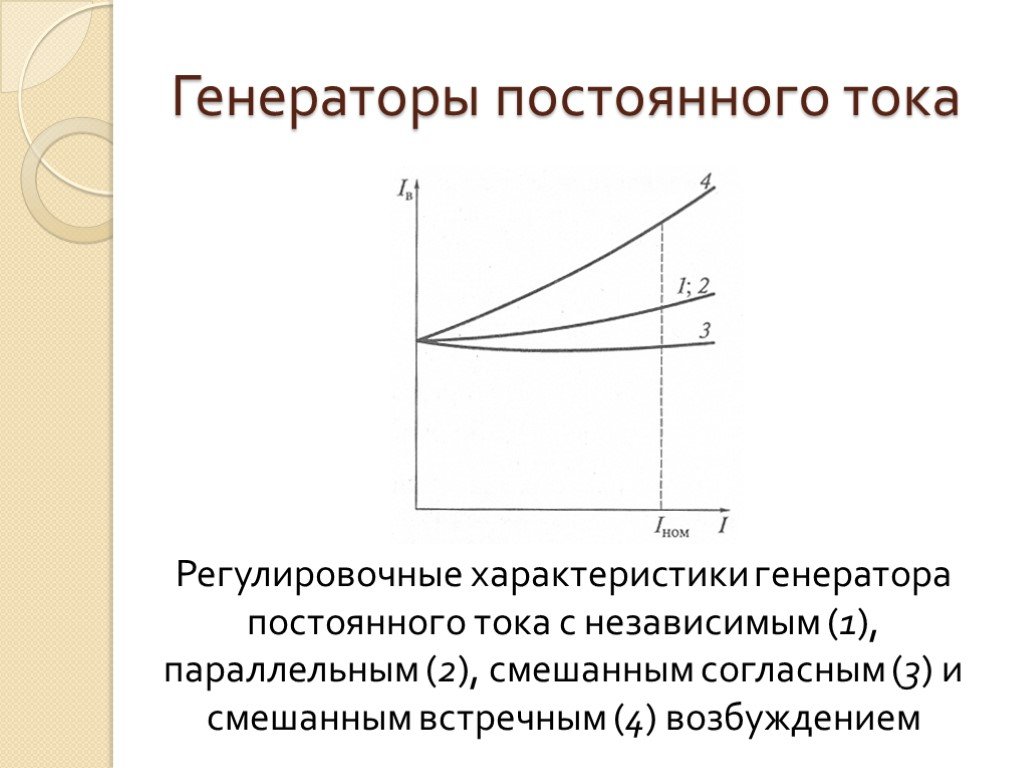 Слайд 51
Слайд 51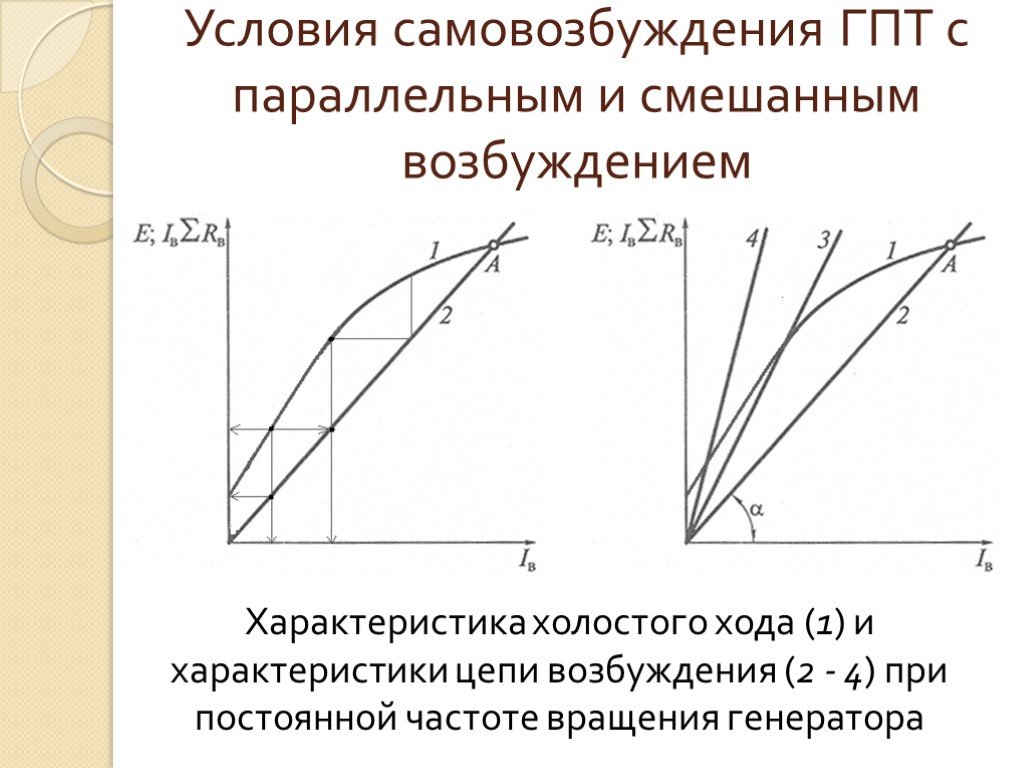 Слайд 52
Слайд 52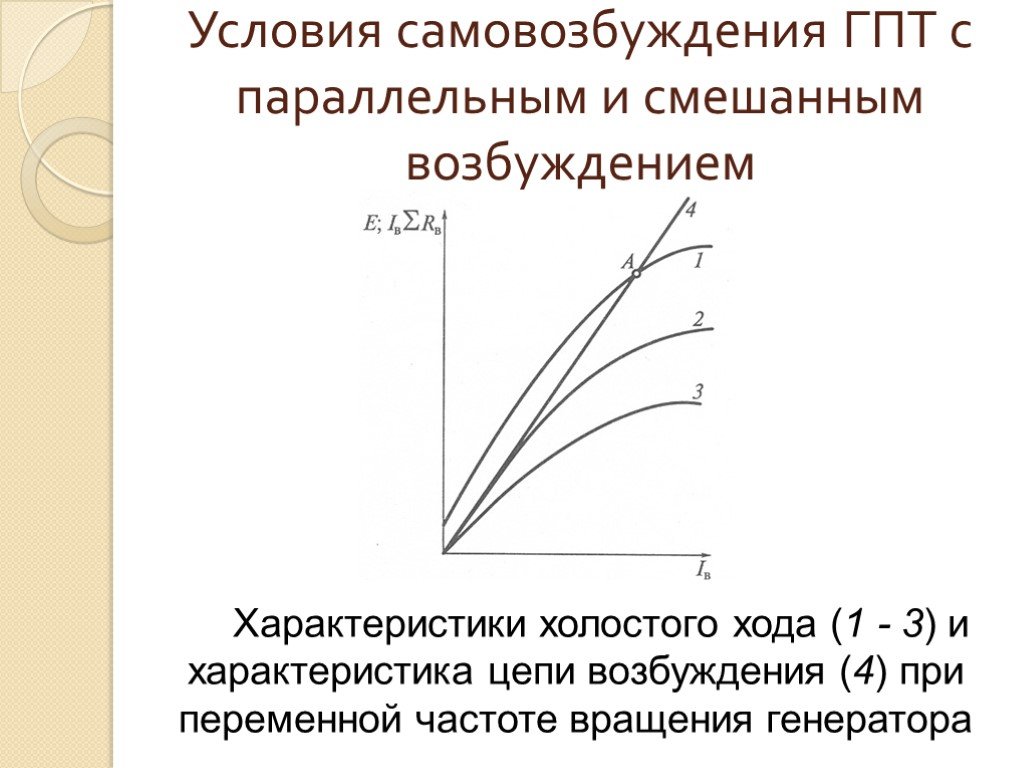 Слайд 53
Слайд 53 Слайд 54
Слайд 54 Слайд 55
Слайд 55 Слайд 56
Слайд 56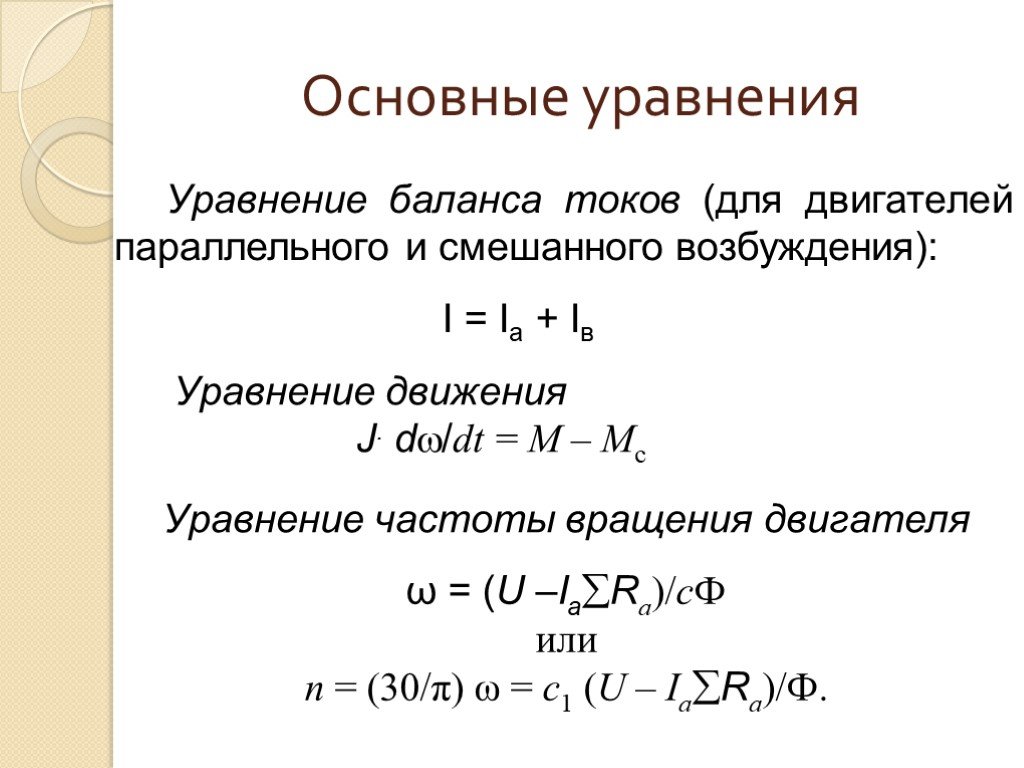 Слайд 57
Слайд 57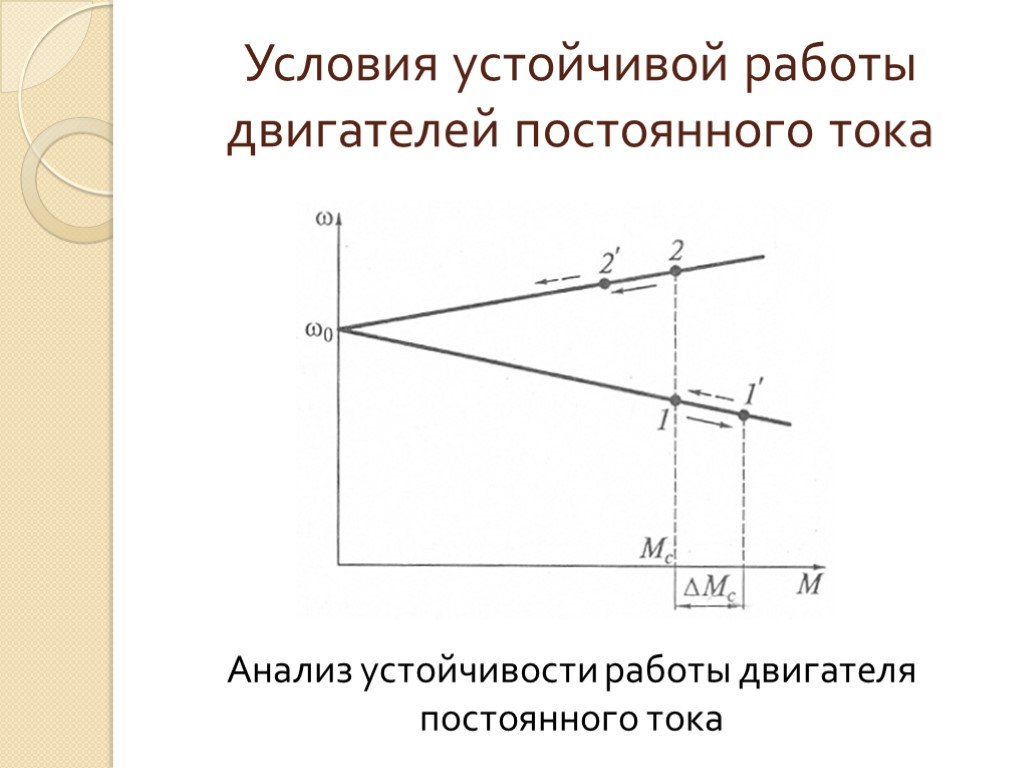 Слайд 58
Слайд 58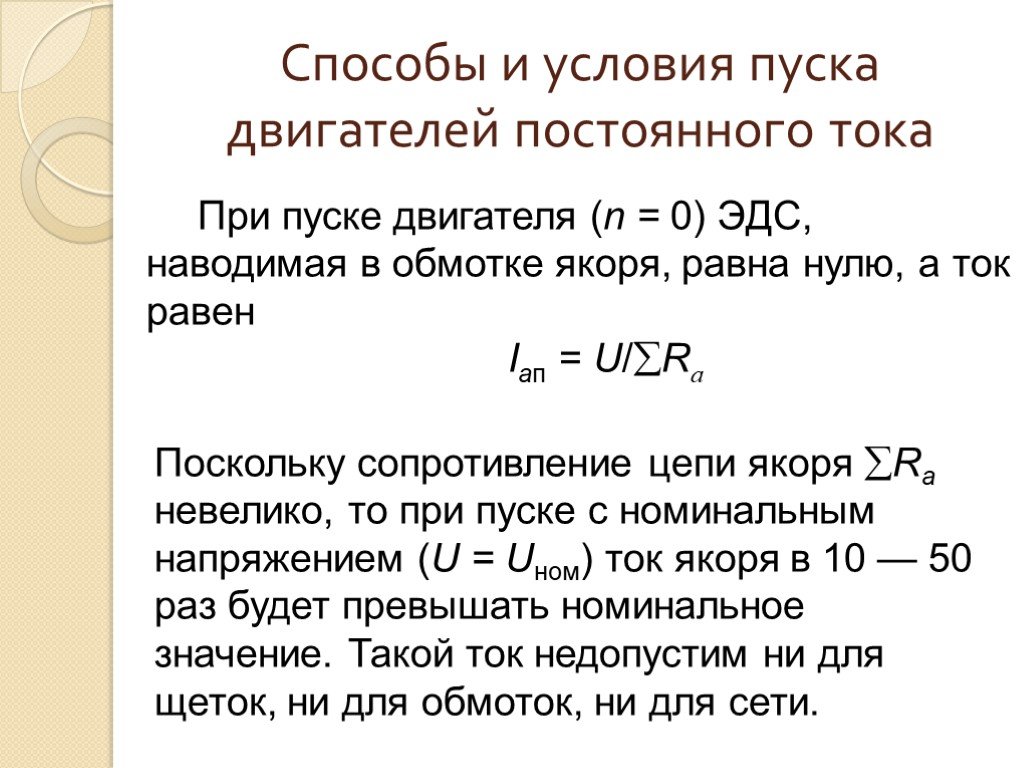 Слайд 59
Слайд 59 Слайд 60
Слайд 60 Слайд 61
Слайд 61 Слайд 62
Слайд 62 Слайд 63
Слайд 63 Слайд 64
Слайд 64 Слайд 65
Слайд 65 Слайд 66
Слайд 66 Слайд 67
Слайд 67 Слайд 68
Слайд 68 Слайд 69
Слайд 69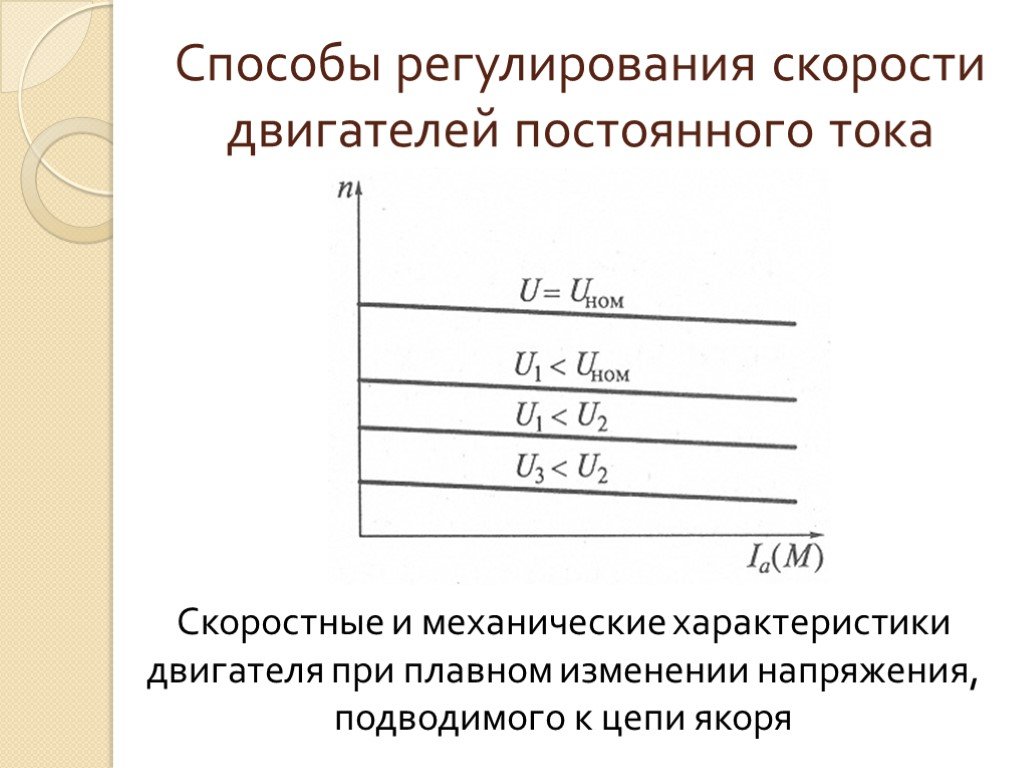 Слайд 70
Слайд 70 Слайд 71
Слайд 71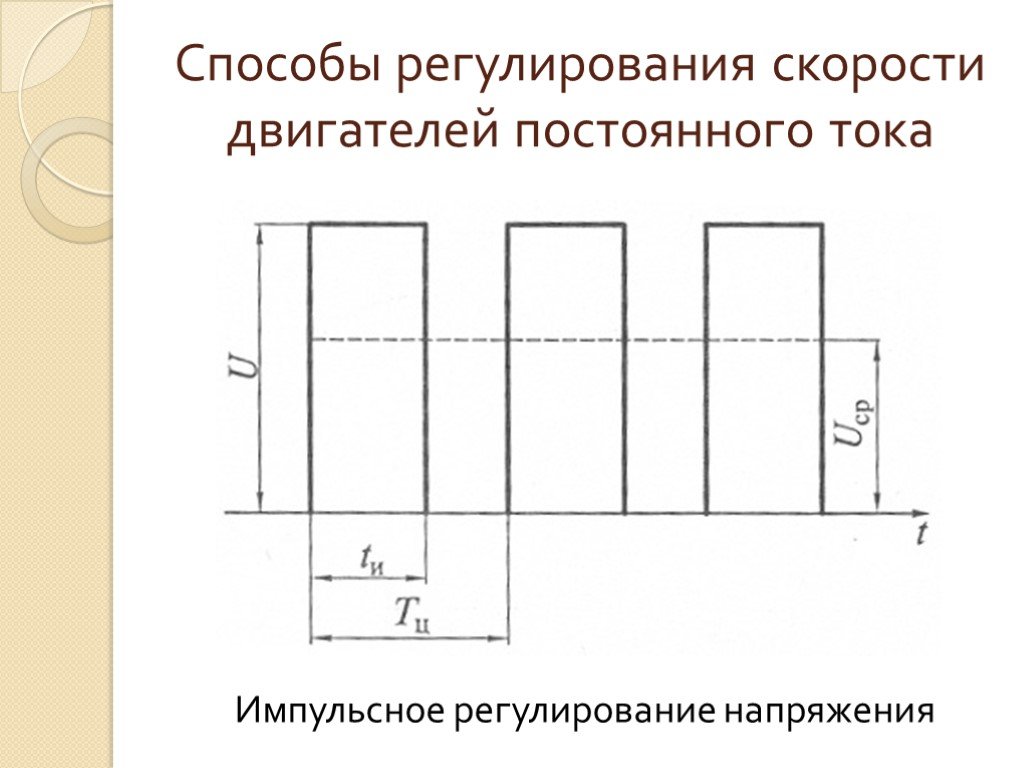 Слайд 72
Слайд 72 Слайд 73
Слайд 73 Слайд 74
Слайд 74 Слайд 75
Слайд 75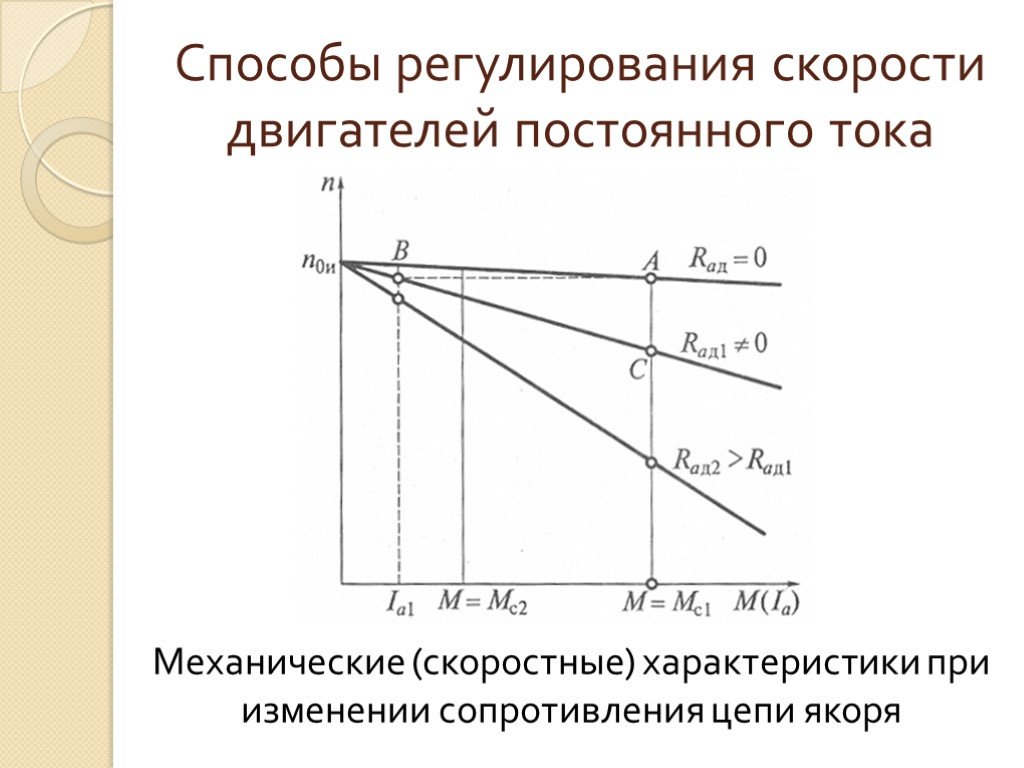 Слайд 76
Слайд 76 Слайд 77
Слайд 77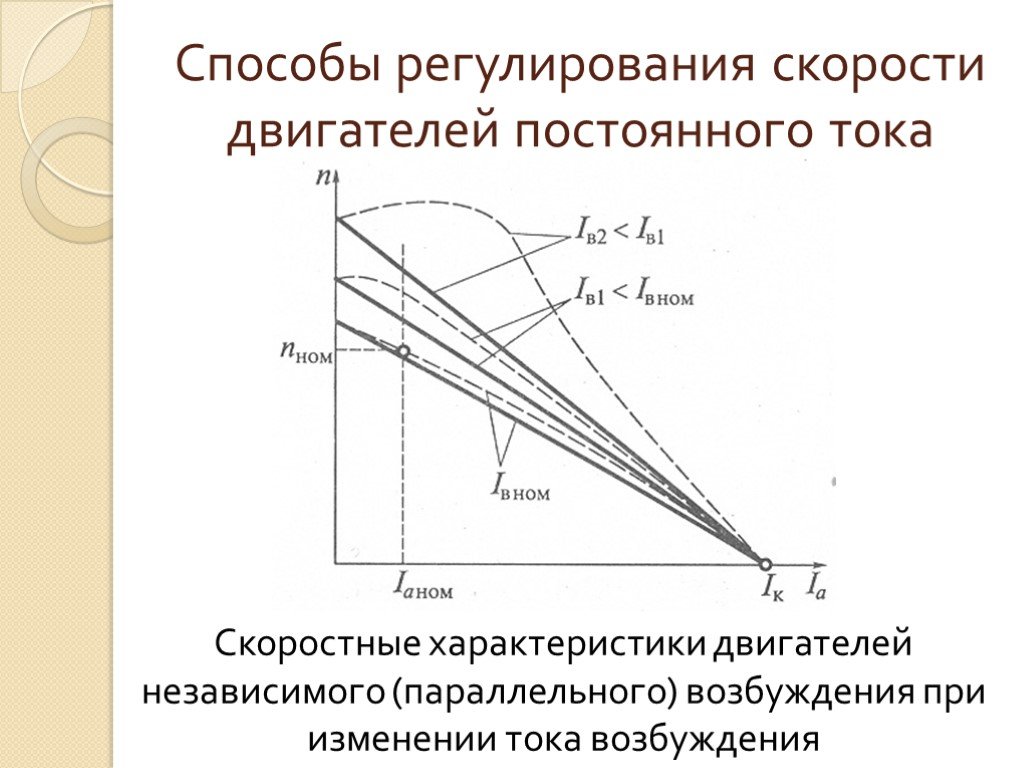 Слайд 78
Слайд 78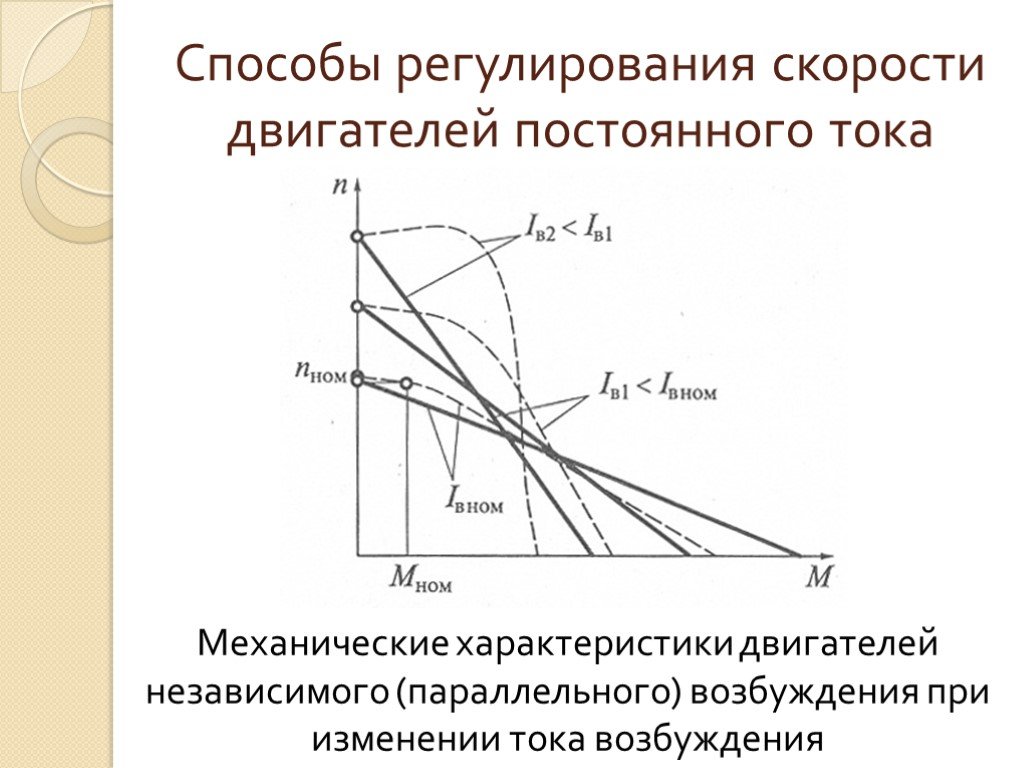 Слайд 79
Слайд 79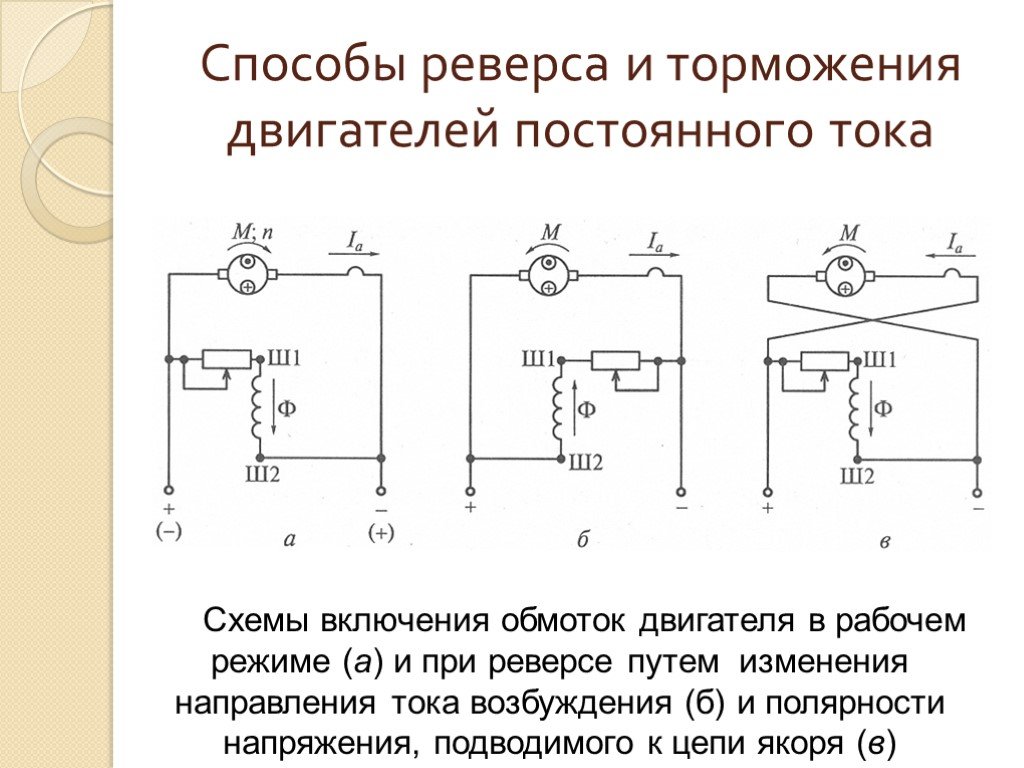 Слайд 80
Слайд 80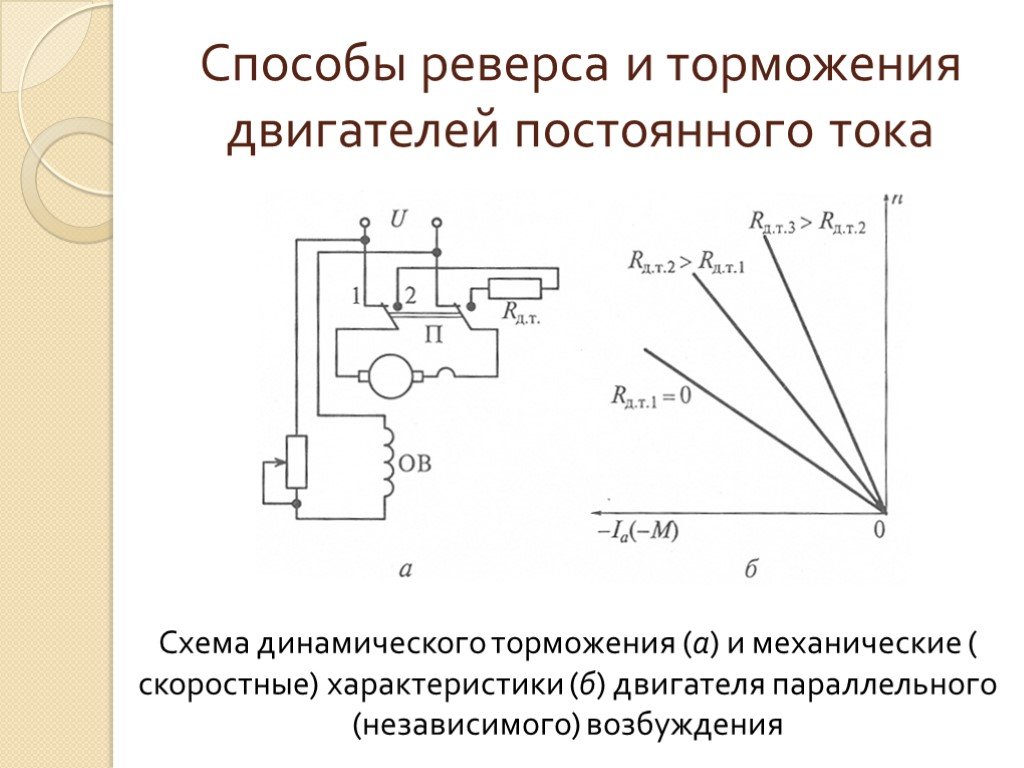 Слайд 81
Слайд 81 Слайд 82
Слайд 82









