Слайд 1ЭЛЕКТРООБОРУДОВАНИЕ ТОКАРНЫХ СTAHКOB
Бендерский Политехнический филиал ПГУ им. Т.Г.Шевченко
Кафедра «ОПДиИС»
Р.В.Яцков преподаватель
Слайд 2Электропривод. Энергию движения металлорежущие станки получают от электропривода, состоящего из электродвигателя, средств управления и защиты. Станок может приводиться в движение от нескольких электродвигателей. Различают привод главного движения, привод подачи, привод быстрых перемещении и т. д.
Слайд 3В качестве электропривода применяют двигатели переменного и постоянного тока. Чаще применяют асинхронные двигатели переменного трехфазного тока с короткозамкнутым ротором, который соединяется непосредственно или через ременную передачу с коробкой передач. Асинхронные двигатели могут быть с одной или двумя частотами вращения (например, 3000/1500; 1500/750).
Асинхронный закрытый электродвигатель с короткозамкнутым ротором
Слайд 4Для бесступенчатого регулирования скорости вращения органов станка применяют асинхронные двигатели с независимым возбуждением и двигатели постоянного тока, которые позволяют изменять скорость вращения в диапазоне 10:1. В состав электропривода кроме электродвигателя и исполнительных органов, станка, с которыми соединен электродвигатель, входят аппаратура управления двигателем, системы электроизмерительных приборов, электрические цепи, аппаратура защиты и др.
 до номинальной,, При пи")
Слайд 5Механические характеристики асинхронных двигателей Асинхронный двигатель с короткозамкнутым ротором является наиболее компактным, надежным и экономичным в эксплуатации, сохраняющим примерно постоянную частоту вращения при изменениях нагрузки от минимальной (при холостом ходе) до номинальной,, При питании обмотки статора трехфазным током в двигателе создается вращающееся магнитное поле, которое пересекает замкнутые обмотки ротора и наводит в них ток. Ток роторной обмотки взаимодействует с магнитным полем двигателя и в результате создается вращающий момент, который приводит во вращение ротор двигателя в ту же сторону, в какую вращается магнитное поле.
Слайд 6Если частоты вращения ротора и магнитного поля равны, то магнитное поле не пересекает обмотку ротора и в ней не возникнет ток; вращающий момент при этом отсутствует. Поэтому частота вращения ротора всегда меньше частоты вращения магнитного поля.
Слайд 7Частота вращения (об/мин) вращающегося магнитного поля называется синхронной частотой вращения и определяется по формуле no=f60/r, где/— f - частота питающего тока, r — число пар полюсов. Отношение разности частоты no вращения магнитного поля и частоты nн вращения ротора к частоте вращения поля no называется скольжением и вычисляется по формуле: S=100(no - nн)/no Двигатели с частотой вращения ротора (nн, отличающейся от синхронной частоты вращения магнитного поля (no), называются асинхронными.
Слайд 8Частота вращения ротора (об/мин) асинхронных электродвигателей определяется зависимостью: nH=60f(l-S)/p Следовательно, частота вращения асинхронного двигателя может изменяться при изменении частоты питающего тока, скольжения и числа пар полюсов. В станкостроении распространено регулирование частоты вращения асинхронного двигателя изменением числа пар полюсов. Такое регулирование бывает двух» и трехступенчатым.
Слайд 9Момент М (Нм) на валу двигателя, угловая скорость ω (1/с) вращения его вала, частота nн (об/мин) вращения вала двигателя и механическая мощность Р (Вт), развиваемая двигателем, связаны следующей зависимостью: М=Р/ ω где ω =π nн /30.
Слайд 10Общие сведения о конструкции двигателей постоянного тока
Двигатель имеет станину 12 (с опорами 26), изготовленную из низкоуглеродистой стали, которая выполняет роль магнитопровода. Сердечники 15 главных полюсов статора набраны из листов электротехнической стали, на каждом сердечнике расположено по две катушки 16 и 22. Сердечники 11 дополнительных полюсов статора выполнены цельными и на них размещены катушки 10.
Слайд 11Ротор в двигателе постоянного тока называется якорем. Сердечник 14 якоря собран на валу 7 и стянут шайбами 8, напрессованными на вал. Обмотка якоря уложена в полуоткрытые пазы 23 и крепится клиньями из текстолита. Лобовые части обмотки закреплены бандажами 9 из стальной луженой проволоки. Концы обмотки подсоединены к коллекторным пластинам 2, которые опрессованы на металлической втулке 4 пластмассой 3.
 возбуждением. Частота вращ")
Слайд 12Механические характеристики двигателей постоянного тока
В станкостроении двигатели постоянного тока применяют для бесступенчатого изменения частоты вращения шпинделя станка или ходового винта привода подач. Наиболее часто применяются двигатели с параллельным (независимым) возбуждением. Частота вращения двигателя постоянного тока определяется по формуле: n=(v-Iя)rя/СеФ, откуда видно, что изменять n можно, изменяя сопротивление rя цепи якоря, магнитный поток Ф или подводимое к двигателю напряжение Се — коэффициент, учитывающий конструктивные особенности двигателя; Iя— ток якоря).

Слайд 13Широкое применение получило регулирование частоты вращения двигателя магнитным потоком. Двигатели включают пусковым реостатом. При повышений частоты вращения двигателя путем изменения магнитного потока предельно допустимая мощность двигателя сохраняется постоянной во всем диапазоне частот вращения. Предельно допустимый момент изменяется обратно пропорционально частоте вращения. Если якорь работающего двигателя отключить от сети и замкнуть на реостат, сохранив возбуждение, электродвигатель переходит в режим работы генератора.

Слайд 14Аппаратура управление и защиты, применяемая на станках
Электрическими аппаратами называют электротехнические устройства, предназначенные для включения и отключения, управления, регулирования и защиты электрооборудования и участков электрических цепей станков.
Электротехнические устройства соединяют или разрывают электрическую цепь посредством электрических контактных соединений. Место соприкосновения элементов электрических соединении называют электрическим контактом.
Слайд 15Детали, посредством которых образуется электрический контакт, называются контактами. В зависимости от формы соприкосновения в электрических аппаратах различают: - точечный, - линейный, - поверхностный контакты.
Типы контактов: а, б, з — точечные, г, d, е — линейные, ж — поверхностный
Слайд 16При отключении контакта сначала размыкаются главные контакты 1—1, однако разрыва цепи в этот момент не происходит, так как ток проходит по дугогасительным контактам 2—2. Затем размыкаются душгасительные контакты и цепь разрывается. Включение контактов происходит в обратном порядке: сначала включаются дугогаеительные контакты, а затем — главные.
Контактное соединение с главными и дугогасительньями контактами
Слайд 17Рубильники с дистанционным рычажным приводом используют в распределительных щитах. На рис. приведена схема трехполосного рубильника-предохранителя с боковым рычажным приводом, предназначенного для включения или отключения электрических цепей под нагрузкой, а также для их автоматического отключения при недопустимых перегрузках и коротких замыканиях. Рубильник состоит из основания 1 и пластмассовой траверсы 2, на которой закреплены в зависимости от числа полюсов два или три предохранителя 3.
Слайд 18Для одновременного включения или выключения нескольких электрических цепей применяют пакетные выключатели и переключатели, которые состоят из двух основных частей — контактной системы и механизма переключения.
а) б) Пакетный выключатель: а — общий вид, б— секция (пакет)
Слайд 19Для автоматического включения, выключения мши переключения электрических цепей (в зависимости от промежуточного или конечного положений подвижных рабочих органов станка) применяют путевые и конечные выключатели. По конструкции они мало чем отличаются друг от друга и могут быть взаимозаменяемы.
Слайд 20Для дистанционного управления работой органов станка применяются кнопки управления, которые могут иметь одну или несколько пар контактов. Кнопочный элемент имеет замыкающие и размыкающие контакты мостикового типа. При нажатии на головку 1 перемещается стержень 5, на котором расположен подвижный контакт 3; при этом размыкается верхняя пара контактов 2 и замыкается нижняя пара контактов 4.
Слайд 21Для автоматического размыкания электрических цепей при нарушении нормального режима их работы (короткое замыкание, перегрузка по току, падение или отключение напряжения) применяют автоматы. Конструкция автомата, показанного на рис., позволяет практически мгновенно разрывать электрическую цепь при токах, превышающих значения, на которые отрегулирован автомат.
Слайд 22Для защиты электрических цепей при нарушении нормального режима работы применяют тепловые реле. Для защиты электрических цепей от перегрузки служат плавкие предохранители, которые отключают защищаемый участок цепи расплавлением токоведущего элемента. Плавкие предохранители включаются в электрическую цепь последовательно. Если ток в цепи превышает допустимое значение, то плавкий элемент предохранителя, последовательно включенный в цепь, расплавляется и разрывает защищаемый участок электрической цепи.
Слайд 23Магнитные, пускатели, предназначенные для пуска, остановки и изменения направления вращения электродвигателя, состоят из контакторов, теплового реле, кнопок управления и плавких предохранителей. При работе с реверсивным двигателем применяются два контактора, при отключении одного из них и включении другого происходит чередование фаз и асинхронный двигатель изменяет направление вращения.
Слайд 24Электрическая схема токарного станка На рис. представлена принципиальная электрическая схема токарного станка мод. 16К20, в соответствии с которой осуществляется управление четырьмя электродвигателями: главного привода M1, быстрых перемещений М2, электронасоса МЗ и гидростанции М4 (при наличии гидросуппорта).
Слайд 25Пуск электродвигателей M1 и М4 осуществляется нажатием кнопки S4, которая замыкает цепь катушки контактора К1, переводя его на самопитание. Останов электродвигателя M1 осуществляется нажатием кнопки S3. Управление электродвигателем М2 осуществляется нажатием толчковой кнопки, встроенной в рукоятку фартука и воздействующей на конечный выключатель S8.
Слайд 26Пуск и останов электродвигателя МЗ производятся переключателем S7. Электродвигатель МЗ сблокирован с электродвигателем M1 и включение его возможно только после замыкания контактов пускателя K1. Для ограничения холостого хода электродвигателя M1 в схеме имеется реле времени КЗ. В средних (нейтральных) положениях рукояток включения фрикционной муфты глазного привода замыкается нормально закрытый контакт конечного выключателя S6 и включается реле времени КЗ, которое через установленное время отключает электродвигатель M1.

Слайд 27В электросхеме предусмотрены блокировочные устройства. При включенном в сеть станке открывание дверей электрошкафа станка приводит к срабатыванию путевого выключателя S7, который возбуждает катушку дистанционного расцепителя F1, в результате чего автоматический выключатель отключает электрооборудование станка от сети. При этом индикатор напряжения НЗ гаснет. При открывании кожуха сменных колес срабатывает микропереключатель S5, который отключает электродвигатель M1.

Слайд 28При проведении нусконаладочных работ переключатель S2 устанавливается в положение 1, а при их окончании — в положение 2. В противном случае при закрывании двери электрошкафа отключится вводный тематический выключатель. В электросхеме предусмотрено подключение лампы Н2 для освещения рабочей зоны станка, которая включается выключателем 89. От перегрузок двигателя защищены тепловыми реле F5, F6, F7. Электроэнергию к электрошкафу подводят от цеховых шинных сборок , (стальных полос, заключенных в общий короб из листовой стал hi), укрепленных на стенах или стойках. В некоторых случаях станки подключают к кабелю, заложенному в шинопроводы и уложенному в полу цеха. Проводку от короба к станку выполняют в трубах, металлорукавах или в коробах меньшего сечения.
Слайд 29Спасибо за внимание!
 Слайд 1
Слайд 1 Слайд 2
Слайд 2 Слайд 3
Слайд 3 Слайд 4
Слайд 4 Слайд 5
Слайд 5 Слайд 6
Слайд 6 Слайд 7
Слайд 7 Слайд 8
Слайд 8 Слайд 9
Слайд 9 Слайд 10
Слайд 10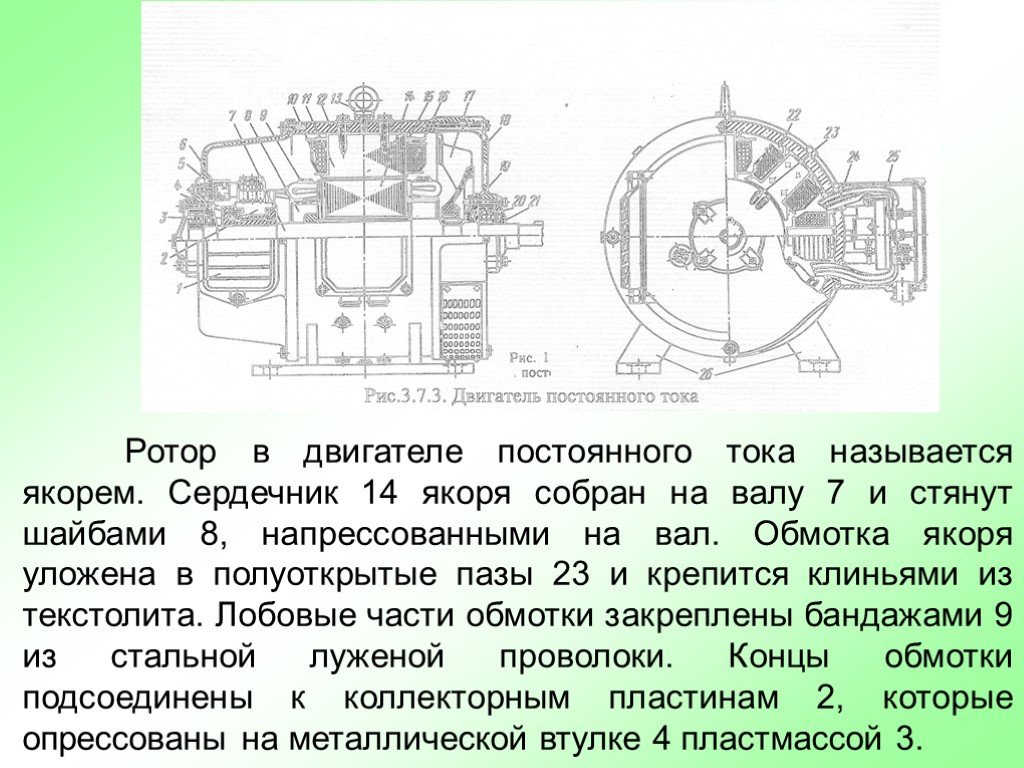 Слайд 11
Слайд 11 Слайд 12
Слайд 12 Слайд 13
Слайд 13 Слайд 14
Слайд 14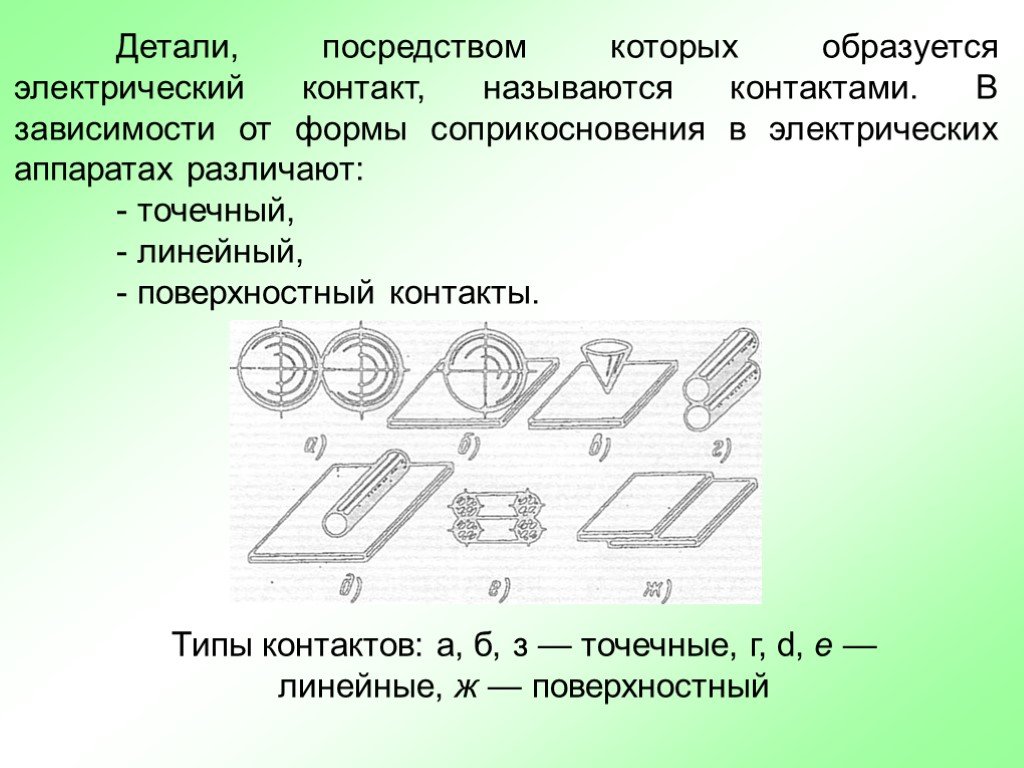 Слайд 15
Слайд 15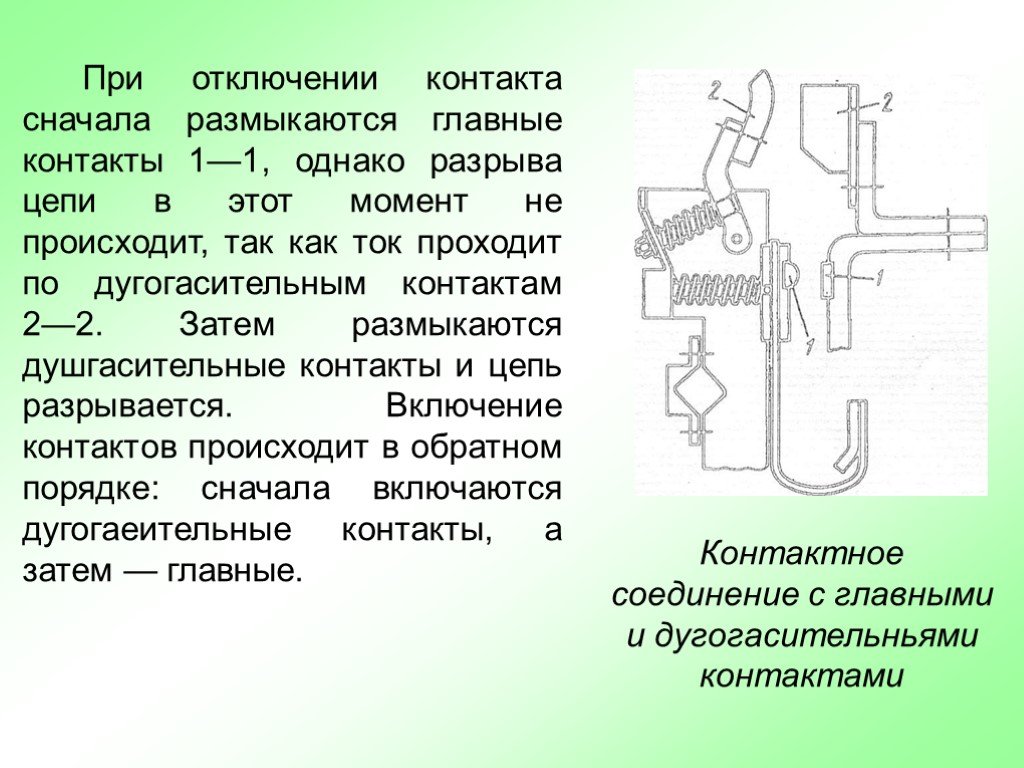 Слайд 16
Слайд 16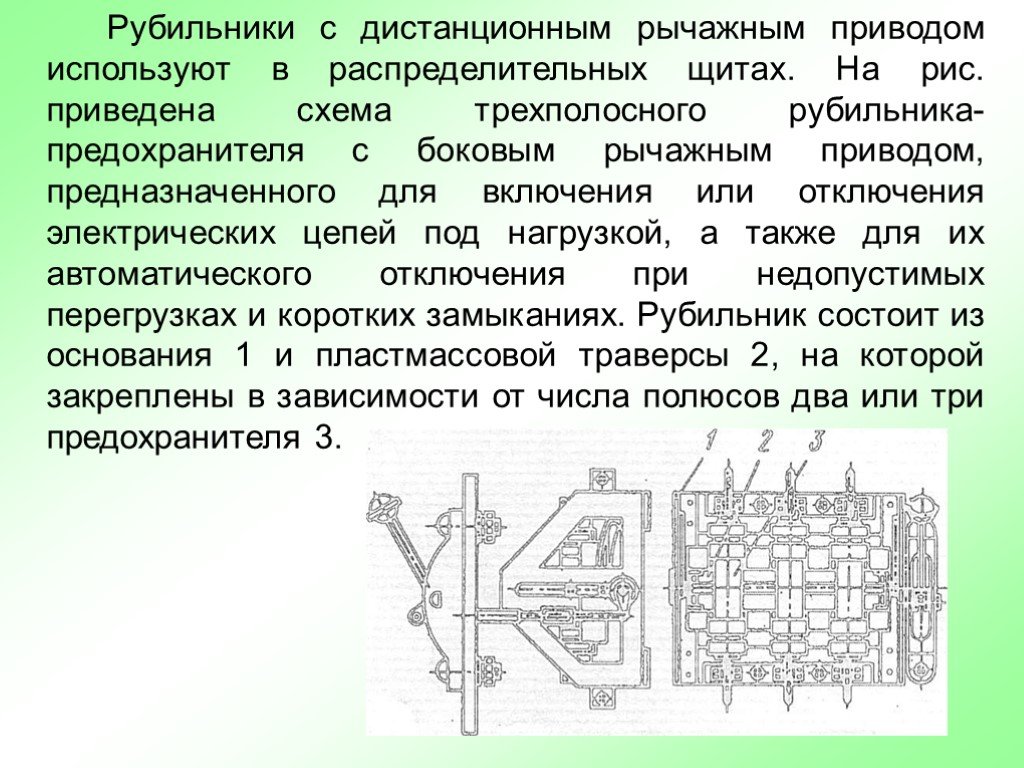 Слайд 17
Слайд 17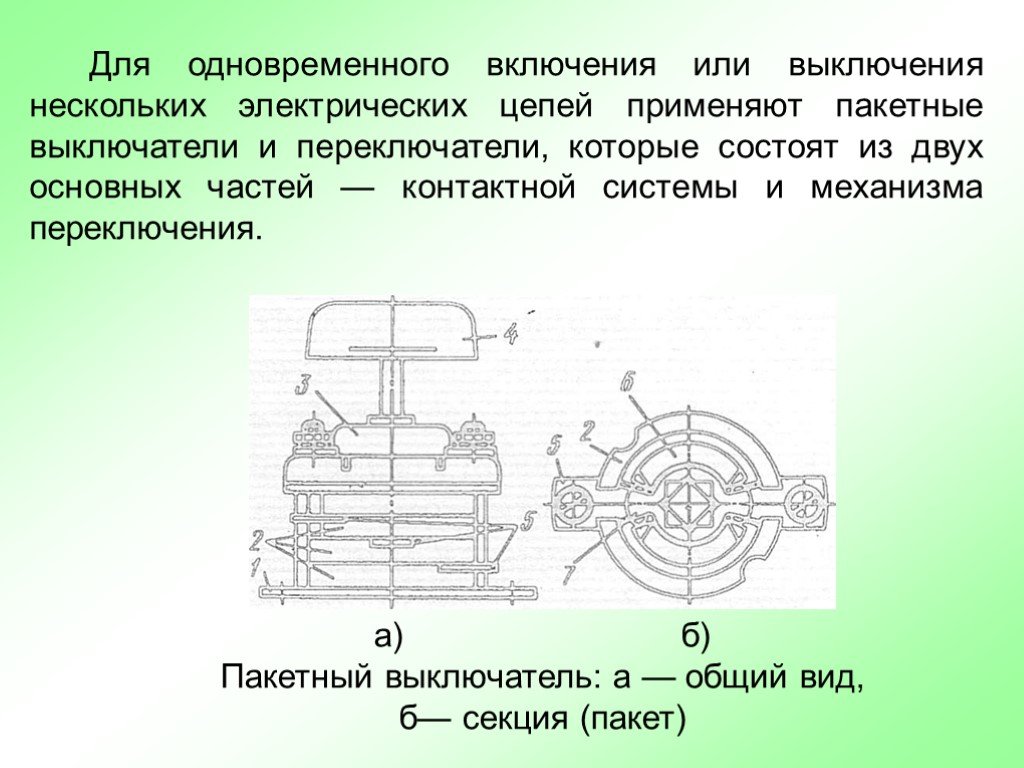 Слайд 18
Слайд 18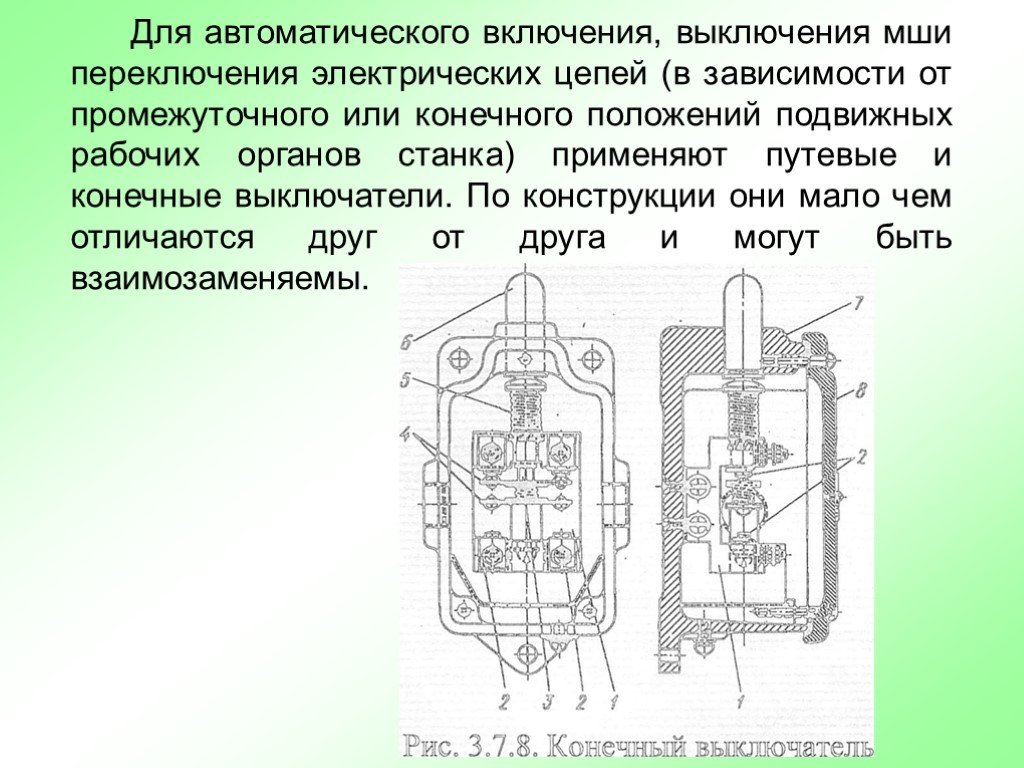 Слайд 19
Слайд 19 Слайд 20
Слайд 20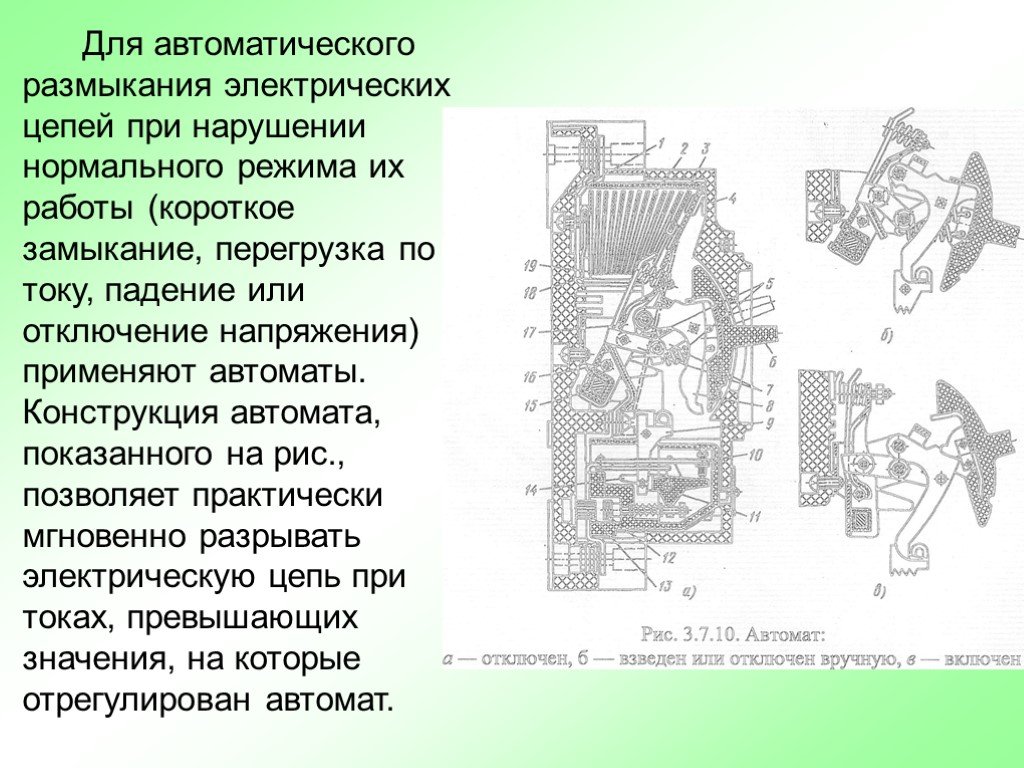 Слайд 21
Слайд 21 Слайд 22
Слайд 22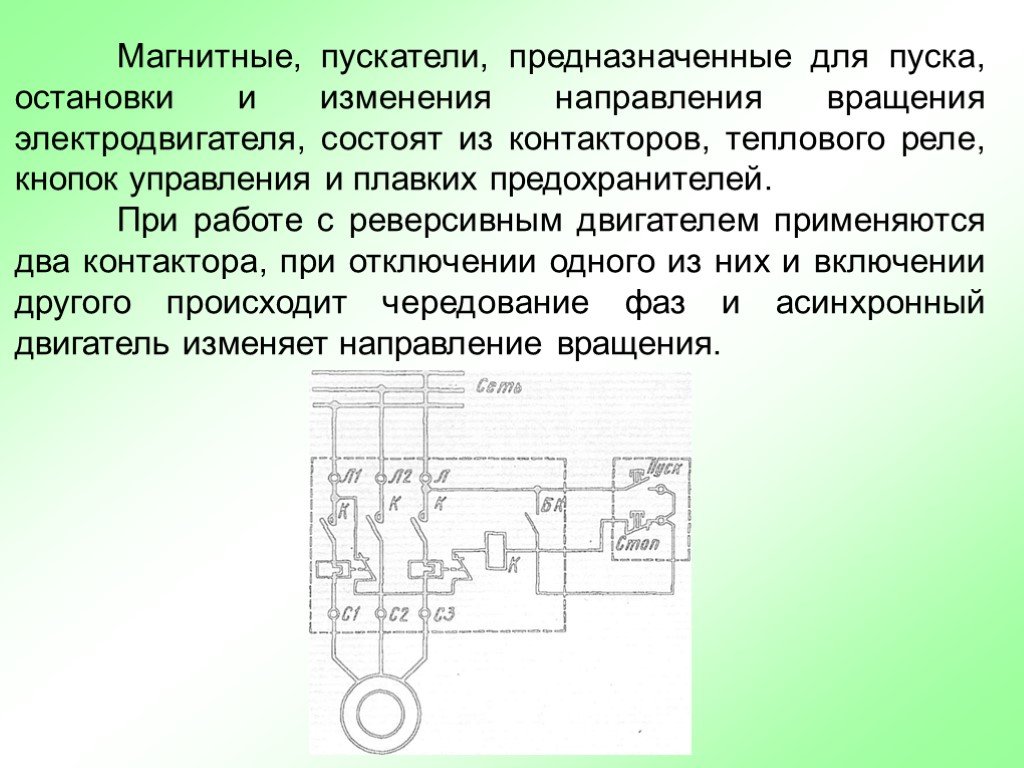 Слайд 23
Слайд 23 Слайд 24
Слайд 24 Слайд 25
Слайд 25 Слайд 26
Слайд 26 Слайд 27
Слайд 27 Слайд 28
Слайд 28 Слайд 29
Слайд 29








