Презентация "Управление и алгоритмы" (9 класс) по информатике – проект, доклад
 Слайд 1
Слайд 1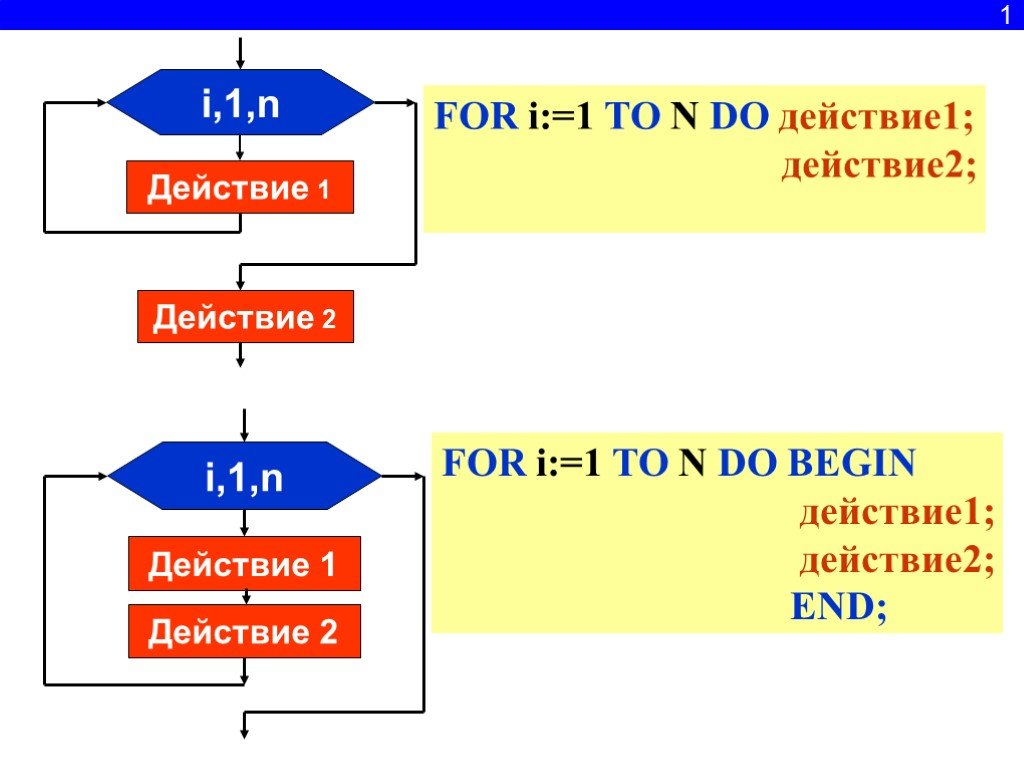 Слайд 2
Слайд 2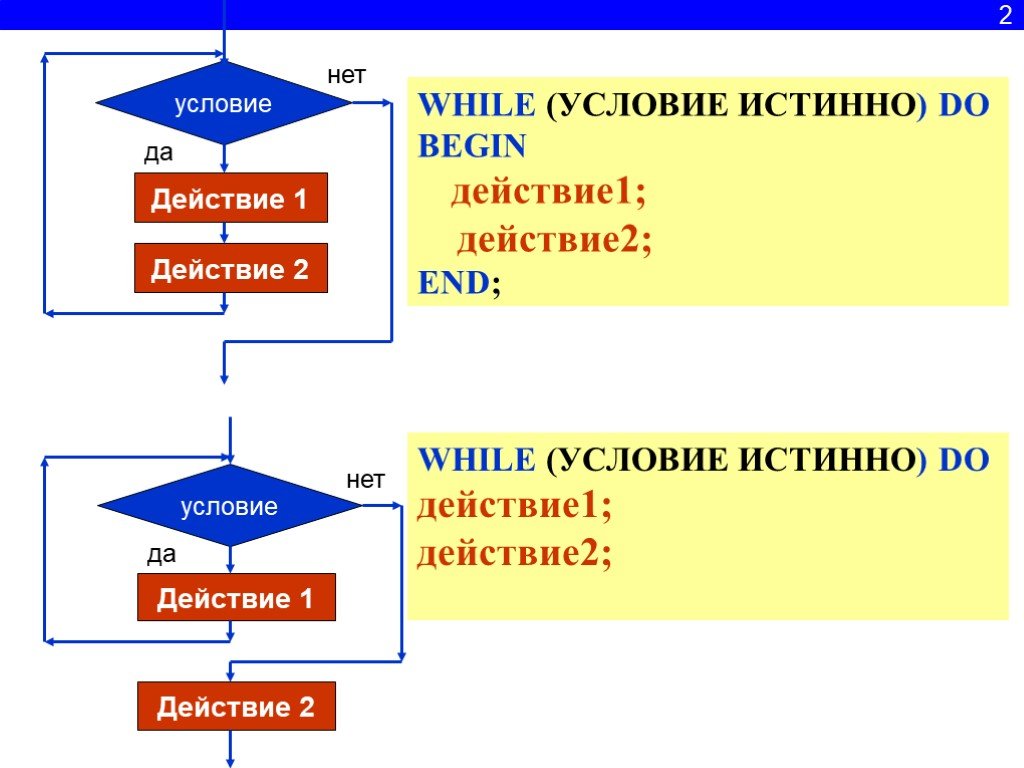 Слайд 3
Слайд 3 Слайд 4
Слайд 4 Слайд 5
Слайд 5 Слайд 6
Слайд 6 Слайд 7
Слайд 7 Слайд 8
Слайд 8 Слайд 9
Слайд 9 Слайд 10
Слайд 10 Слайд 11
Слайд 11 Слайд 12
Слайд 12 Слайд 13
Слайд 13 Слайд 14
Слайд 14 Слайд 15
Слайд 15 Слайд 16
Слайд 16 Слайд 17
Слайд 17 Слайд 18
Слайд 18 Слайд 19
Слайд 19 Слайд 20
Слайд 20 Слайд 21
Слайд 21 Слайд 22
Слайд 22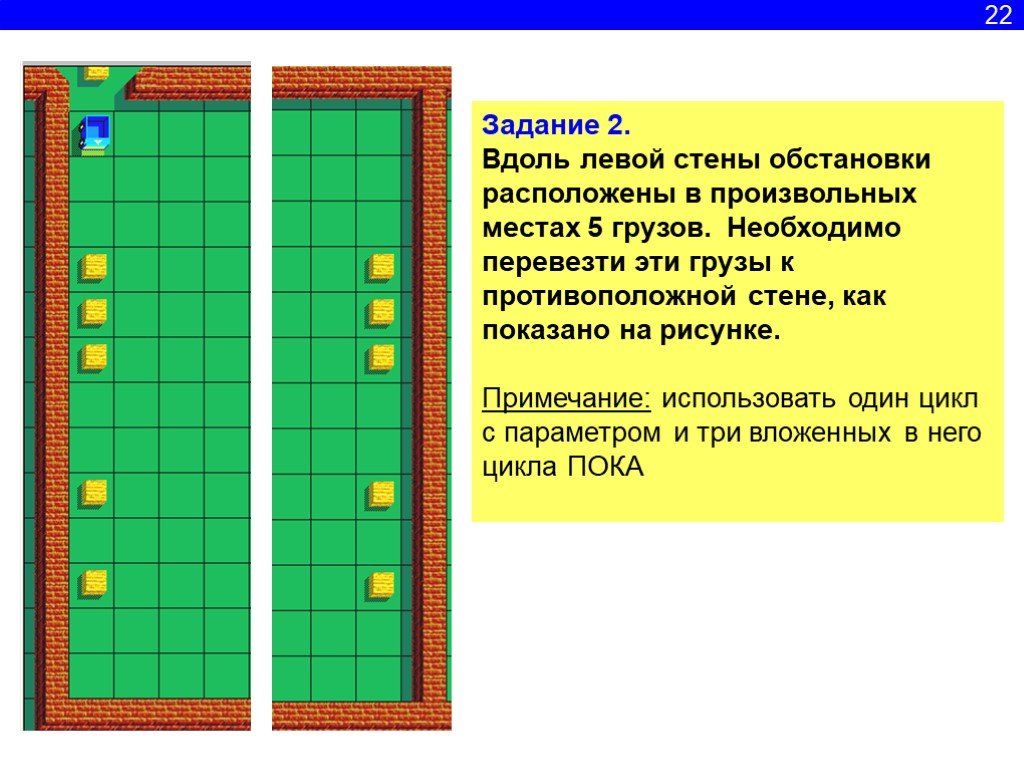 Слайд 23
Слайд 23 Слайд 24
Слайд 24Презентацию на тему "Управление и алгоритмы" (9 класс) можно скачать абсолютно бесплатно на нашем сайте. Предмет проекта: Информатика. Красочные слайды и иллюстрации помогут вам заинтересовать своих одноклассников или аудиторию. Для просмотра содержимого воспользуйтесь плеером, или если вы хотите скачать доклад - нажмите на соответствующий текст под плеером. Презентация содержит 24 слайд(ов).
Слайды презентации
Список похожих презентаций

Управление файлами в программном обеспечении MSC
Оператор NASTRAN входит в секцию FMS и является необязательным. Используется для изменения глобальных параметров выполнения расчета. Если этот оператор ...
Управление компьютером
Компьютер – это автоматическое программно управляемое устройство. Работу компьютера обеспечивает специальная программа – операционная система. Может ...
Управление памятью
Виртуальная память. Основная идея заключается в разбиении программы на части, и в память эти части загружаются по очереди. Программа при этом общается ...
Разветвляющиеся алгоритмы
Сформулируйте определение разветвляющегося алгоритма ? Разветвляющийся алгоритм – алгоритм, в котором в зависимости от выполнения или не выполнения ...
Управление жизненным циклом разработки корпоративных приложений
Содержание. Основные этапы разработки приложений Требования к корпоративным системам Доп. инструменты разработки Тестирование и сопровождение. Основные ...
Базовые циклические алгоритмы
Сколько раз выполнится цикл? Что появиться на экране в результате выполнения следующего фрагмента программы? For i:=-2 to 1 do begin writeln(‘*****’); ...
Рабочий стол. Управление мышью
Рабочий стол – это изображение на экране монитора готового к работе компьютера. Рабочий стол Значки (картинки). Ярлыки (картинки со стрелочками ). ...
Грис. Линейные алгоритмы
ГРИС Линейные алгоритмы. Урок № 3. 1. Какой из объектов управляющий? Какая связь прямая? Запиши: Управляющий объект № Прямая связь объект №. 2. Какой ...
Грис. Линейные алгоритмы
ГРИС Линейные алгоритмы. Урок № 4. Алгоритмический язык. программа нач кон. Пример: программа рис1 нач шаг шаг поворот шаг кон. Сборочный метод. ...
Вспомогательные алгоритмы и подпрограммы
Вопросы. Какую работу может выполнять ГРИС? Что представляет собой среда исполнителя ГРИС? В чём разница между управлением в прямом режиме и в программном ...
Вспомогательные алгоритмы с аргументами
Команды абсолютного и относительного смещения. ( х и у отсчитывается от начала координат 0,0). сместиться в точку (х, у). сместиться на вектор (а, ...
Вспомогательные алгоритмы
Содержание. 1. Вопросы для подготовки к зачету 2. Метод пошаговой детализации 3. Подпрограммы 3.1. Преимущества использования подпрограмм 3.2. Организация ...
Ветвящиеся алгоритмы
Ветвящиеся алгоритмы. Урок № 8. Последовательность команд управления, приводящая к поставленной цели Свойство алгоритма Вспомогательный алгоритм в ...
Ветвящиеся алгоритмы
Ветвящиеся алгоритмы. Урок № 7 17.02.2011. Ветвящейся алгоритм – это алгоритм, в котором в зависимости от условия выполняется либо одна, либо другая ...
Циклические алгоритмы
Тип урока: изучение нового материала. Цели: Предметные: формировать знания учащихся о циклических алгоритмах; Личностные: вызвать интерес учащихся ...
ЕГЭ-2017 по информатике "Задание 11. Рекурсивные алгоритмы"
Теория Рекурсия вокруг нас Рекурсия в математике Программирование Задачи на закрепление Список использованной литературы. Содержание. Реку́рсия (RECURCIО ...
Циклические алгоритмы
План лекции. Оператор безусловного перехода Повторяющиеся действия Циклы с предусловием Циклы с постусловием Циклы со счетчиком Сложноциклические ...
Линейные алгоритмы
Алгоритмизация – процесс разработки алгоритма (плана действий) для решения задачи. Алгоритм называется линейным, если все его действия выполняются ...
Рабочий стол. Управление компьютером с помощью мыши
Цели урока: · ввести на интуитивном уровне первые понятия графического интерфейса - рабочего стола, значка ярлыка; · показать, что пользователь взаимодействует ...
Линейные алгоритмы
Линейные алгоритмы. Алгоритм приготовления Помидоры с сыром и чесноком Сыр натереть на мелкой терке. Добавить выдавленный через чеснокодавку чеснок. ...Конспекты
Стандартные алгоритмы обработки массивов. Двумерные массивы
Класс: 9 дата:. Тема: Стандартные алгоритмы обработки массивов. Двумерные массивы . Цель. : познакомить учащихся с двумерными массивами, способами ...Типы алгоритмов: линейные, разветвляющие и циклические алгоритмы
Дата проведения: --------------------. Урок № 9. . Тема урока:. ". Типы алгоритмов: линейные, разветвляющие и циклические алгоритмы. ". . Цели:. ...Разветвляющиеся алгоритмы
Обобщающий урок по теме «Разветвляющиеся алгоритмы». Урок — «детективное» расследование «Найти человека!». Раздел программы:. «Алгоритмизация ...Стандартные алгоритмы обработки массива
ИВТ,. . 9 класс Дата:20.12.14Урок №14 Тема урока:. . Стандартные алгоритмы обработки массива. Цель урока:. . 1) формирование понятия массива, ...Управление файлами с помощью файлового менеджера Krusader
10 класс. Физико-математический профиль. ОС Alt Linux «Школьный мастер 5.0.2». . Урок на тему «Управление файлами с помощью файлового менеджера ...Исполнитель Чертежник. Управление Чертежником
Заглодина Светлана Александровна. учитель информатики МОУ гимназии №1. имени Л.И. Белова города Галича Костромской области. Методическая разработка ...Линейные алгоритмы
Тема урока «Линейные алгоритмы». Цели урока:. Развить представления учащихся об алгоритмах;. . Определить тему урока, ее применение;. . Систематизировать ...Управление компьютером с помощью мыши
Информатика и ИКТ. Класс. 8. дата. 25.11.2014 г. Тема:. Управление. компьютером с помощью. мыши. Тип урока:. комбинированный. Цель:. . Обучающая:. ...Линейные алгоритмы
Урок-киностудия. по информатике. в 7 классе. Линейные. . алгоритмы. Учитель информатики. . ГУО «Гимназия г.Ветки». первой квалификационной ...Линейные алгоритмы
Муниципальное общеобразовательное учреждение. «Средняя общеобразовательная школа №8 г. Петровска Саратовской области». ...Советы как сделать хороший доклад презентации или проекта
- Постарайтесь вовлечь аудиторию в рассказ, настройте взаимодействие с аудиторией с помощью наводящих вопросов, игровой части, не бойтесь пошутить и искренне улыбнуться (где это уместно).
- Старайтесь объяснять слайд своими словами, добавлять дополнительные интересные факты, не нужно просто читать информацию со слайдов, ее аудитория может прочитать и сама.
- Не нужно перегружать слайды Вашего проекта текстовыми блоками, больше иллюстраций и минимум текста позволят лучше донести информацию и привлечь внимание. На слайде должна быть только ключевая информация, остальное лучше рассказать слушателям устно.
- Текст должен быть хорошо читаемым, иначе аудитория не сможет увидеть подаваемую информацию, будет сильно отвлекаться от рассказа, пытаясь хоть что-то разобрать, или вовсе утратит весь интерес. Для этого нужно правильно подобрать шрифт, учитывая, где и как будет происходить трансляция презентации, а также правильно подобрать сочетание фона и текста.
- Важно провести репетицию Вашего доклада, продумать, как Вы поздороваетесь с аудиторией, что скажете первым, как закончите презентацию. Все приходит с опытом.
- Правильно подберите наряд, т.к. одежда докладчика также играет большую роль в восприятии его выступления.
- Старайтесь говорить уверенно, плавно и связно.
- Старайтесь получить удовольствие от выступления, тогда Вы сможете быть более непринужденным и будете меньше волноваться.
Информация о презентации
Дата добавления:4 ноября 2018
Категория:Информатика
Классы:
Содержит:24 слайд(ов)
Поделись с друзьями:
Скачать презентацию









